Hi
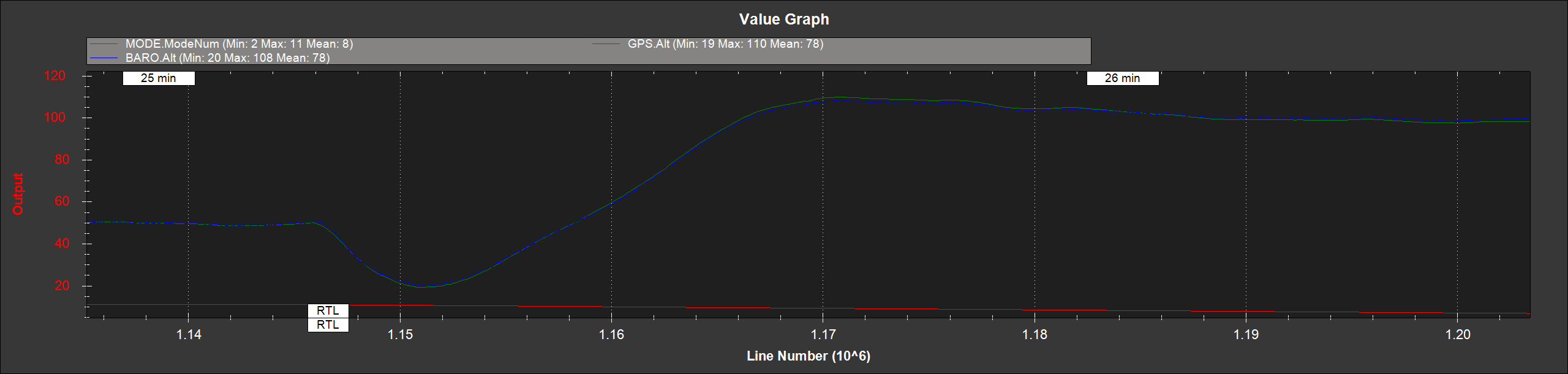
Not sure why but it is consistent, when switching from AUTO to RTL the plane loses altitude and almost crushing before climbing to ALT_HOLD_RTL
Can you assist debugging?
Thanks
Hi
Not sure why but it is consistent, when switching from AUTO to RTL the plane loses altitude and almost crushing before climbing to ALT_HOLD_RTL
Can you assist debugging?
Thanks
Hi,
Could you please attach the dataflash log and provide more details about the flight. It would help others identify the issue.
You’re probably flying below the cruising speed and it’s diving to pick up airspeed.
Adding the flight log
the Auto flight was at 25-27 m/s while FBW min is 15 m/s
It doesn’t use FBW min for either of those states. It should use “TRIM_ARSPD_CM” for both which you have set to 2500. You have THR_PASS_STAB set to zero so your transmitter inputs wouldn’t cause the issue either.
Even though it was going about 26M/S when you switched from Auto to RTL, it sure looks like it thought it was going too slow. The Arspd_Err term spiked, it pitched down and applied full throttle to speed up. I don’t know why though.
Which firmware version are you using? I wonder if it has a bug in this area.
It is in the log as well ![]() “MSG, 1429479068, ArduPlane V3.7.1 (22b5c415)”
“MSG, 1429479068, ArduPlane V3.7.1 (22b5c415)”
Any has an idea why something like that happens ??
Happened again today also on 3.8.2, not sure what i am doing wrong…
here is the log:
https://drive.google.com/open?id=1nbV3J6gLxRkx_ft1AmBi6ZCKjo0QxU8J
Only thing came to mind please tell me if related, it was a new build after a crash, and needed trim to hold alt at manual flight, after trim in manual i tried STABILIZE was fine also, than moved to RTL and it dropped the nose, if i landed redo RC calibration and try it than would it prevent the dive?