when I load 3.1 on the pixhawk all is ok but when I upload 3.1.2 or 3.1.1 then the horizon in mission planner starts to turn around slowly. 360 degrees see attachment and the altitude is giving very strange values
(see attachment), and when I load 3.1 turning is over and altitude is normal
[attachment=0]pixhawk 3.1.2.jpg[/attachment]
Is this a known problem?
And second question when I have the 3dr external gps/compass I don’t have to selct rotation 180 like with the apm, is that right?
Ok, i’m pretty sure this is a bad side effect of the shortened arming procedure in AC3.1.1/AC3.1.2.
I’ll send you a new binary in the next 48h to try. Hopefully we can find a middle ground that allows fast arming but also get the gyro calibration right.
You’re not moving the quad when you first plug it in are you? I suspect you’re not.
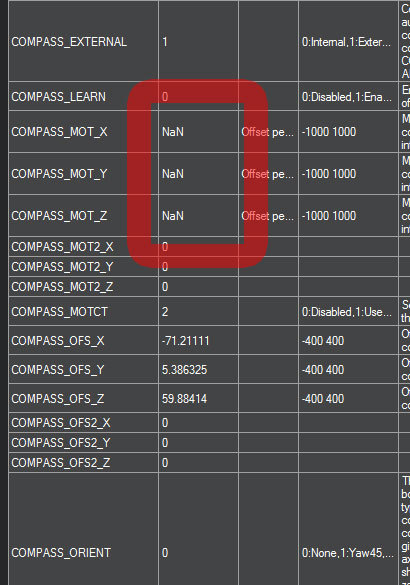
This is because you have non numerical values in your compassmot offsets. Write them at zero through your mission planner full param list and you will have a stable horizon.
I bet you tried a compassmot? It is a known bug with pixhawk.
With Pixhawk COMPASS_ORIENT = 0 and COMPASS_EXTERNAL = 0 and the Pixhawk will automatically detect the correct setup. with APM you have to set them manually.
The issue is not solved. Other posts are coming out about HUD drift issues for lots of other users. Seems we found a real bug here. Let’s hope it is not hardware related, so it can be fixed by software.
Please change the status of this post so it is not marked as solved. Thx.
This is because you have non numerical values in your compassmot offsets. Write them at zero through your mission planner full param list and you will have a stable horizon.
I bet you tried a compassmot? It is a known bug with pixhawk.[/quote]
This appears to be my issue, so the values NaN shown in this screen capture should be set to 0?