Hi, I am new to the Pixhawk and having some issues getting it working.
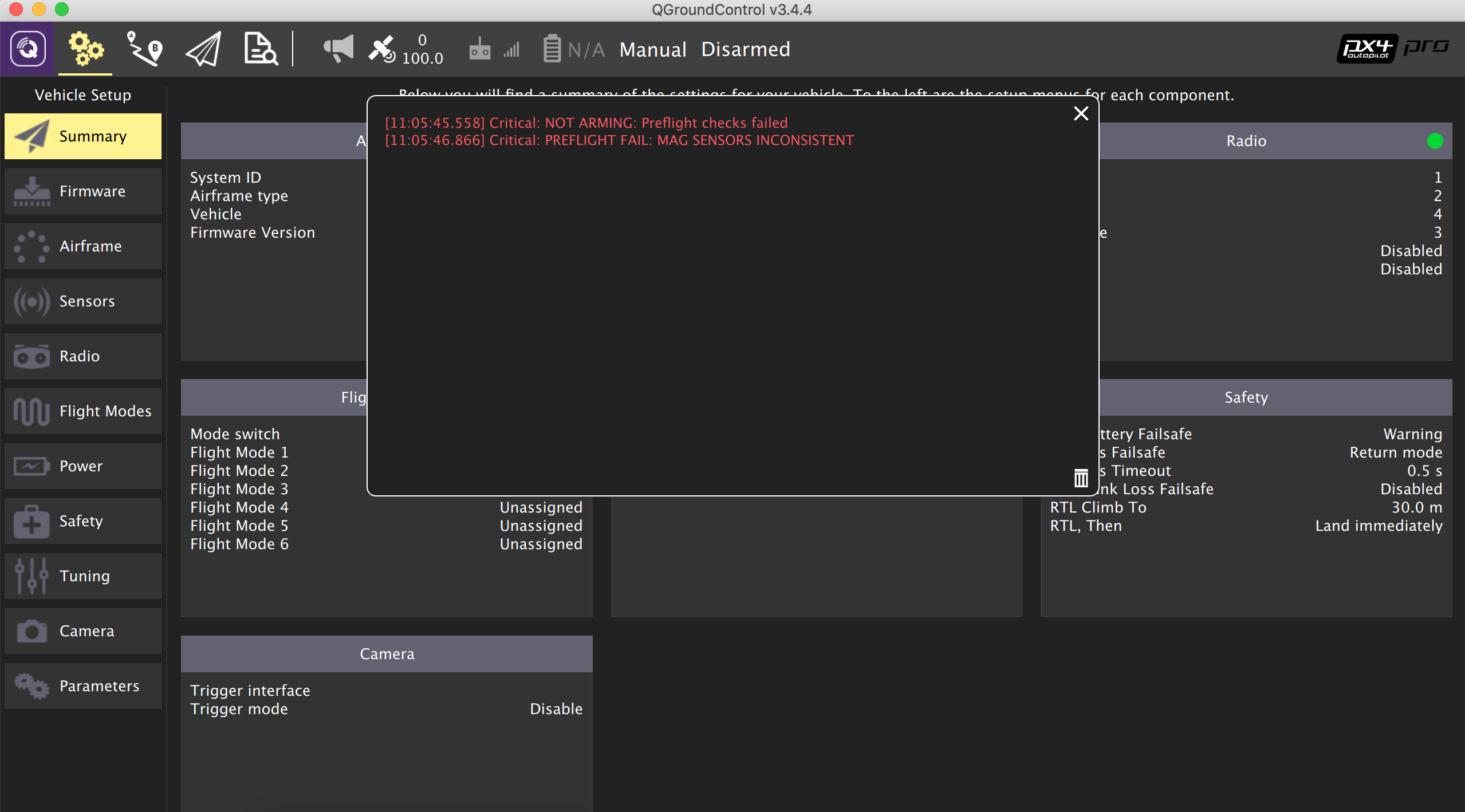
I am receiving the Preflight Fail: MAG SENSORS INCONSISTENT error. I have already tried the following with no luck:
- recalibrate sensors
- recalibrate radio
- update firmware
Can anyone help?
It says magnetometer inconsistent, check your compass is ok and correctly calibrated and setup.
Your photo shows you have PX4 firmware loaded to the autopilot.
You’re welcome to try ArduPilot on your Pixhawk 4, and if you do then the community here can help.
If you want help with firmware you currently have loaded, the best place to ask is discuss.px4.io
As a new user, don’t be afraid to check out both.