Hello everyone, please help me understand the reasons for the crash of my drone, the crash happened at the final stage of the short test auto mission, the drone stopped moving at waypoints and just slowly descended and crashed into the garage door.
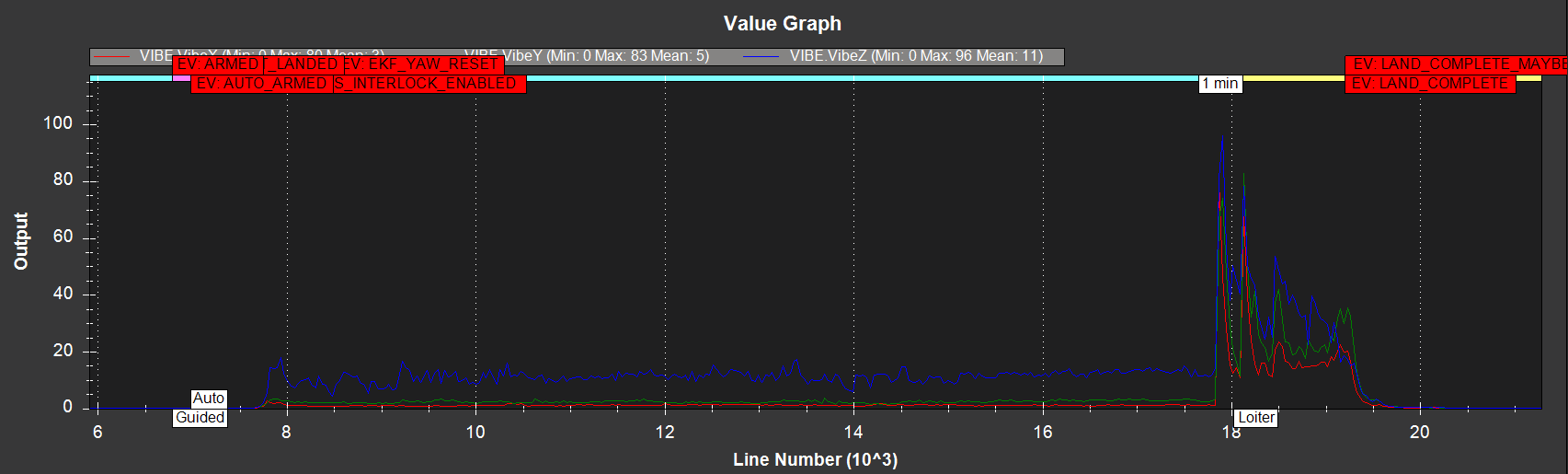
your vibration suddenly increased at minute one and this is the reason of crash
but to find out the reason of increasing vibration check them :
is everything is solid in your build ?
is your motors are healthy ?
is your propellers ok and blanced ?
it seems that problem started a few seconds before minute 1 with your motors or propellers
That vibe event is likely when it crashed into the garage, I don’t think it’s a cause of the crash. The vibe levels are OK while it’s flying. Make another flight and simply Hover several meters off the ground in AltHold for a couple minutes and post that log.
@hosein_gh I also paid attention to the vibration and the message about the vibe failsafe, but the drone itself was very stable in flight, also the setup did not change for more than 15 flights, I had no problems with vibration, in addition, I use carbon propellers, which I additionally manually balance.
@dkemxr unfortunately I broke almost all my propellers, ordered new ones, as soon as they arrive, I’ll fly again and post the log.
Thanks for the help.
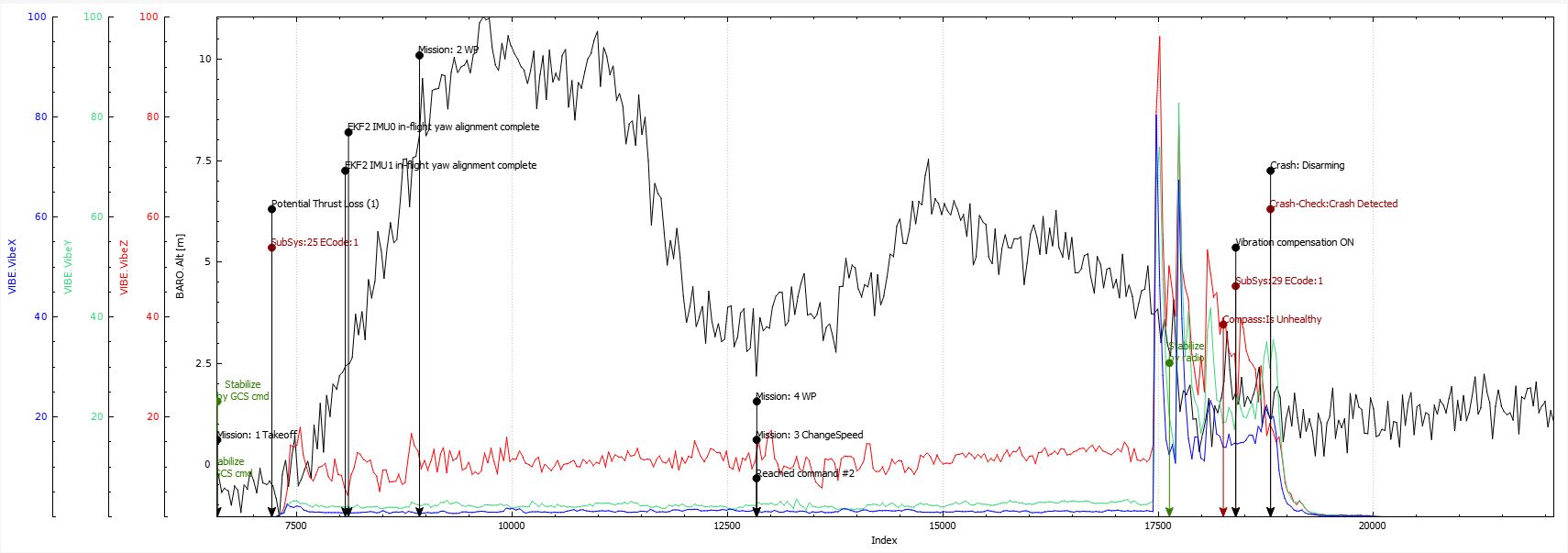
@dkemxr look at this graph

copter is at ~4m altitude first vibration increased then we can see a big difference between Roll,DesRoll and Pitch,DesPitch then its losed its altitude and crashed
did you ever switched to Loiter flight mode ?
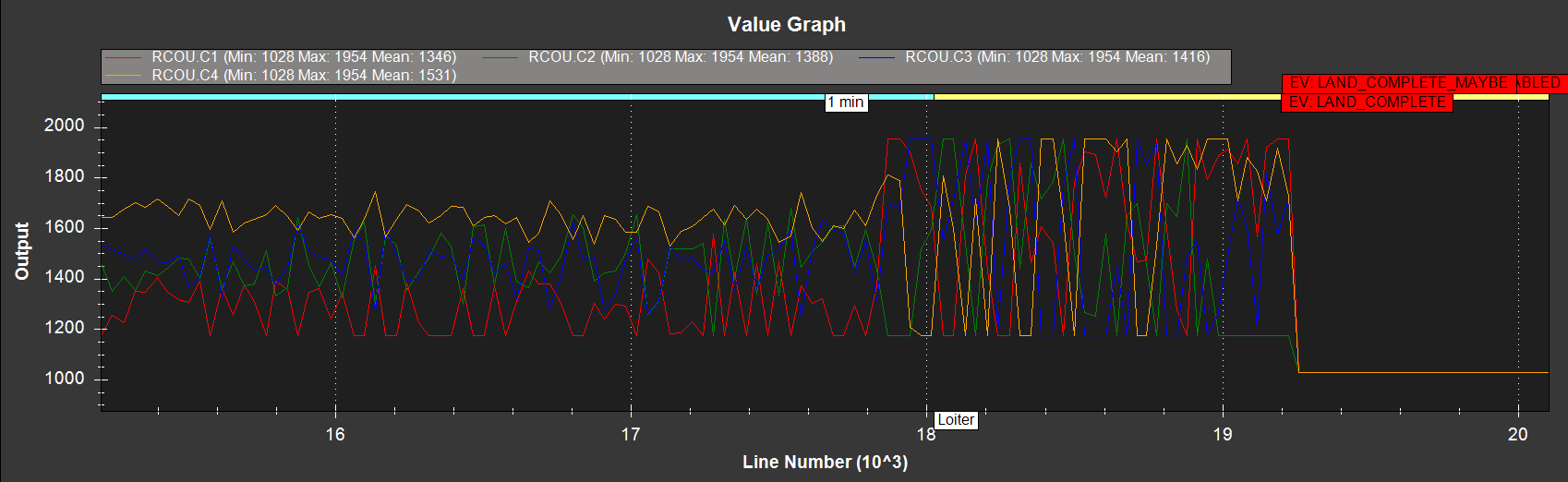
mission planner shows Loiter but Apm planner show Stabilize !
Yes, that’s the same graph I posted zoomed in to when it hit the garage. Look at the baro and based on his description this is most likely when it hit the garage. During normal flight all vibes were <20
I suppose he switched Modes after it crashed. The Log says it switched to Flight Mode 6 (~2000µs) which is programmed for Loiter.
I launched the mission from the phone, used qgroundcontrol, the transmitter lay next to me turned on on the ground, after creating the mission, the GCS offered to run the mission, after that. as the copter began to descend and I realized that it was not controlled, I began to switch something emotionally, maybe I switched to some mode but it was too late, everything happened quickly due to the low altitude.
Yes, you can see action initiated by GCS and then a mode change from the radio in the log after the big hit.