I am trying to set up my new Pixhawk 2.1 board, but when I try to fly it is so wobbly and becomes out of control.
When plugged on the computer, I sometimes have the warning Bad Gyro Health.
Here is what I tried to do without any success:
Flash another type of vehicle and reflash 3.5.2 quad firmware
De-activate the GPS
Lower the PIDS to minimum
Tried the board on another functional quad
Change battery, it worse with a 4S one than with a 3S
Calibrate successfully a few times the ESCs
I have also noticed the light below the cube is not green when powered, is this showing an issue?
Here is the log of my lastest try where I lost control and crashed 2m away from me… 2017-09-20 10-07-30.log (225.4 KB)
Yes I first tried to take off with normal PIDs values, but it is really bad, I cant even fly…
I tried to lower them down to see if it improved, my quad is a 280mm, smaller than everyone else I guess.
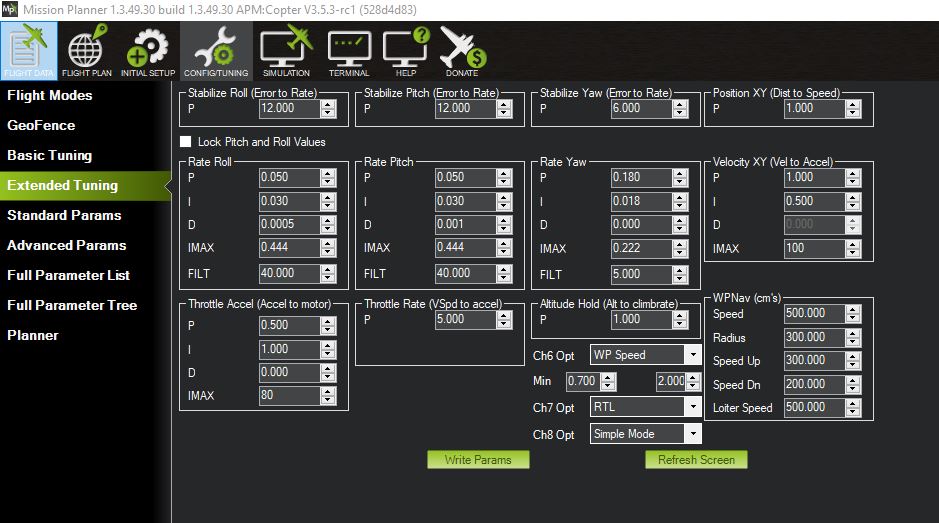
I have done the firmware upgrade to 3.5.3, set gains to 1/3 and raised up filter values to 30.
Here some updates (not necessarily linked to the changes IMO)
5” props + 3S battery = No oscillations ( or not noticeable)
5” props + 4S battery = No oscillations ( or not noticeable)
6” props + 3S battery = bad oscillations
6” props + 4S battery = very bad oscillations to control loosing.
for the 6"/4S setup, half the gains yet again, then try poshold autotune. You may have to increase the filters again: do this incrementally (10Hz at a time), but you want this figure as low as possible so try decreasing the gains and autotuning first.
Here are the PID values I manually tuned on a 210 mini quad with a soft mounted PixRacer. I’m not suggesting you copy them its just to give you an idea of the direction you will likely have to take with respect to Rate Roll/Pitch PID and filter.