This is a fresh rebuild of a 1000 size Octo.
Previously flying with a Pixhawk 1, Septentrio AsteRx-m in SBF mode, working up to RTK testing.
Ground tested RTK to +/-6mm
Have used Firmware 3.5rc1 and 3.4.5
Fitted Pixhawk2.1 and first tests resulted in the Octo heading off in random directions with no response to RC stick input. Retrieved and saved by switching back to Alt Hold or Stabilise.
Fitted 3DR uBlox6 GPS module, recalibrating compasses once again
(I am really building muscles dancing around the back paddock with an 8kg Octo)
getting toilet bowling, reading the forum, working out the combination of Main compass #, internal and external, a recalibrating compasses a few more times (aching muscles now) loiter was very locked in, even in wind gusts to 3m/s.
Changed GPS cable from 3DR unit to AsteRx-m (they use the same plug) with no other changes except the SBF parameters, and yet another F#@n compass calibration, and the Octo takes off in random directions again.
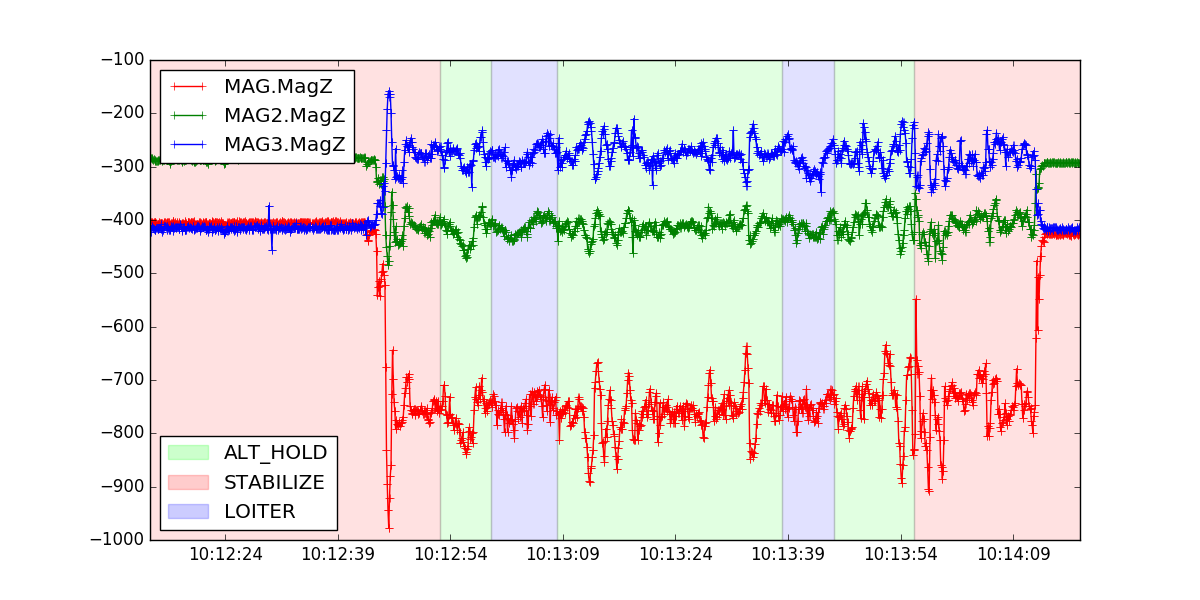
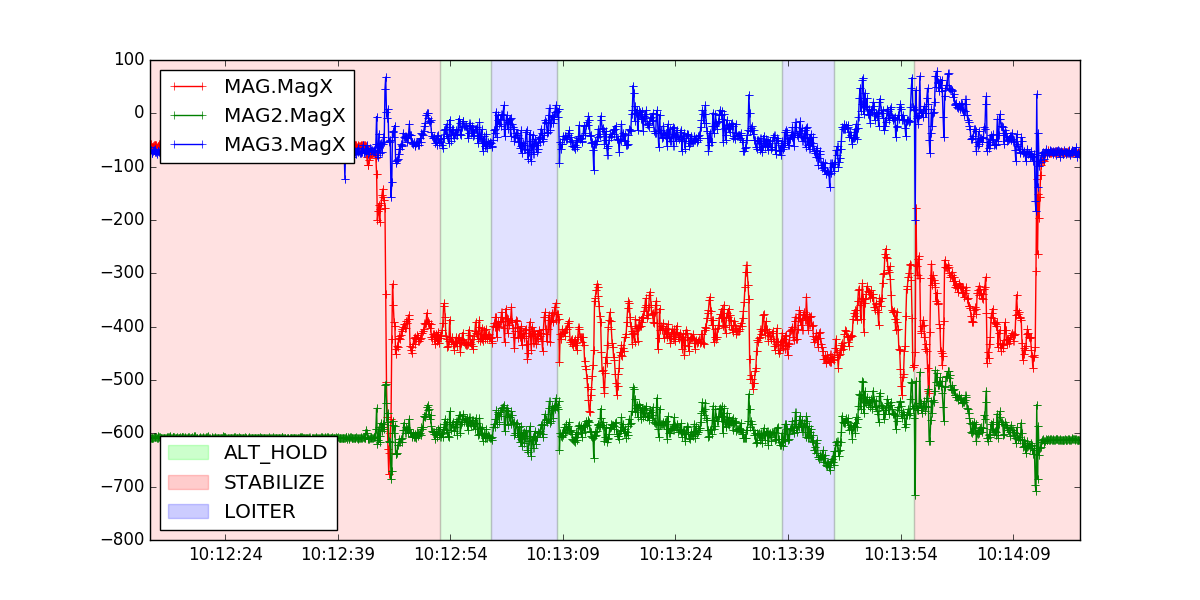
Mission Planner reports a 3D Fix, as you can see in the logs, and the GPS location does not move around.
So I am at a loss as to the reason this is happening with the PH2,1 and not the PH1.
If this can’t be resolved the Pixhawk 2.1 is going to have to be shelved, which is a pity as I like the hardware and also a PITA. More bloody rewiring.
Flight log and AsteRx-m log attached.
Any suggestions welcome, anyone?
2017-02-21 09-12-11.bin (3.4 MB)
Septentrio Log