Chris,
I have downloaded your Copter3.6_TradHeli_Setup file. My Rate P and D were definitely higher than in your file.
One value should not be there – **FRAME_TYPE = 1 – **. But should be ignored not used for Heli.
Hi Fred, you are correct. I mistakenly forgot to delete that one when I edited the original file. Since it doesn’t hurt anything I guess we’ll leave it there.
Wow, what caused your crash of your Jet Ranger?
Fred, an additional comment on your scale model - you can disable your governor and with the new throttle curve in 3.6 you can set it to get a truly scale runup. This is just on the throttle curve - no governor being used. Since we got that new throttle curve I like it better than the governor because it’s smoother. I don’t engage the governor anymore unless I’m flying auto mode.
Hi Chris,
yes, I do want to use the throttle curve. I followed your videos and your writing about that for a wile.
My new TR600 has not a Castle ESC anymore. I will test everything with the 600 first. Than I will get the Jet Ranger into shape. On the flying photo has the Jet Ranger 2 blades only and the tail has been fixed.
Regarding the accident. It happened on the ground. It was flying well with VFF only. After I introduced a little roll D gain. The Heli lifted a few inch off the ground and got the roll oscillation badly. I set it on the ground but had not enough minus for collective pitch to push it down to the ground. The Heli firstly seams to be ok. But the oscillation effected the long "Der Blattschmied scale blades". Those twisted and were bending like snakes. One blade hit the tail and it was all over. On the photo one blade is obscured by the other in the front.
You can see that flexing clearly when you watch the videos frame by frame. I expected oscillation because I experienced that during the RJX520 tuning. But you can not use scale blades for this kind of tuning. Theymust be stiff. My spin-blades can cope easily which I used for the second Jet Ranger tuning with 2 blades only.
The Jet Ranger is flying now but it also has that pitch bobbing now like OAPpilot.
If you want to see that short video from two angles taken, I can put it into Dropbox for you. I do not put it on YouTube.
One more question Chris, regarding Mode 3 - new throttle curve.
How will that work with my direct drive variable pitch (DDVP) setup. Both Helis have that and hopefully that works with mode 3. Thank you.
Hi Chris, I managed to get to the flying field this morning, It was quite windy for testing, but I decided to do a PosHold at about 10mtrs High. It was jumping about a bit, but settled down a bit when I turned it.with the wind. The Roll & pitch are not as good as before.
Geoff
I think with the added weight of the scale body you need to turn the headspeed up to get the hover collective more in the range of 5-7 degrees. This will improve the stability and is the first thing I would do before changing any other settings.
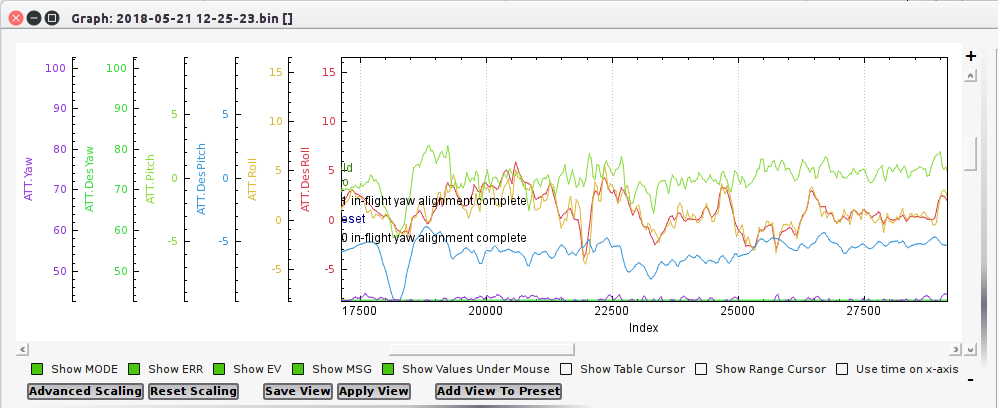
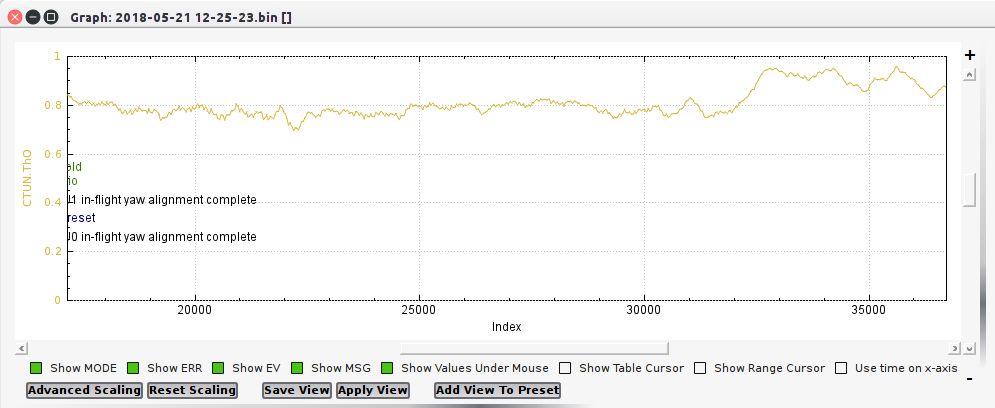
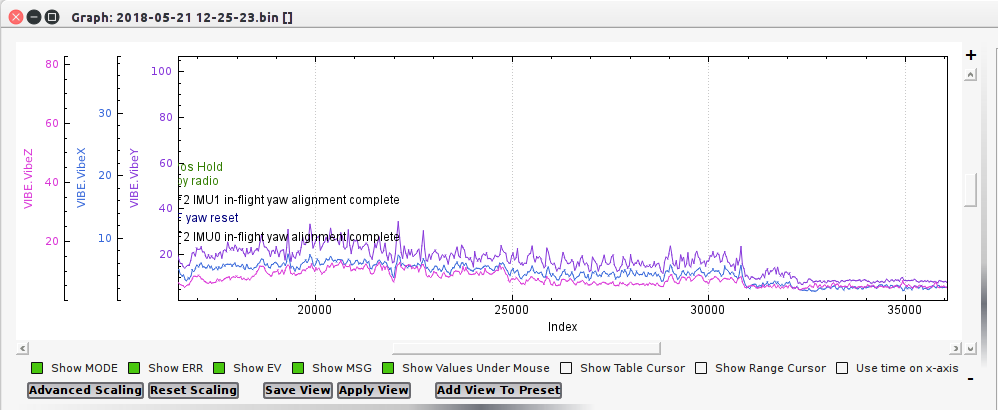
One thing I do note is that your y-axis vibes are MUCH lower with the new tune. Which indicates to me that the y-axis vibes were being induced possibly by your tail shaking back and forth:
On the collective pitch issue, with scale heli’s there’s two ways to get into the proper range - either use “scale” blades that have asymmetric airfoil and create more lift at lower rpm. Or turn up the headspeed until you get it to hover at 5-7.
Fred, it will work fine. The tail will ramp at the same speed you set the main ramp time to. The throttle curve will only be used by the primer mover for the main. The tail speed will be set as normal with the tail setting.
Wow. Not good. Negative collective is bad with those blades - it will cause them to flex into the tail boom even with everything else right. A fellow at the RC club blew up a Bell 222 model with some plastic asymmetric blades (can’t remember the brand). It was built on a Trex 700 frame, running low headspeed and he had too much negative pitch. He pulled neg pitch when he landed it, the blades flexed down and it exploded.
I thought it is the other way around with those blades. 0-pitch and oscillation they flex. Doesn’t matter I will never come in the same situation again.
I must say with the 3 blade head the Heli had enormous more lift than the half symmetric from Spinblade.
That strong lift is a bit of a pain in wind gusts.
But it must be told to all beginners with scale body Helis " don,t use the scale blades for tuning, it isdangerous"
With the DDVP now.
I tested it and the tail speed is not changing speed like the main motor is with the throttle curve… That was done with the governor off in the Castle tail ESC.
I think I will put the tail ESC back into Governor RPM mode and than I can use 3 speed curve for the tail. Even the Main motor has the 5 point curve it should work I believe.
Hi Fred,
I’m not sure. I saw that scale model blow up and it definitely did not like negative pitch. But like yours, those plastic/composite blades were very flexible. They actually drooped down with the rotor at rest.
Hi Chris
I just did a bench test with the 600 and your new throttle curve. I like it very much with my new 120A YepESC. But to get it to work with my DDVP I have connected the tail back with a y-cable to get variable speed from the ch8 into the Castle tail- ESC. It works but 3 different speed only.
That has to be fly tested now to see if the Pixhawk is pitching the tail blades properly with the Main blades changing speed. If I don,t like it I have to go back to Mode 1. I will let you know after the weather gets better here.
Fred, why not just drop the Y-cable and drive your tail ESC with channel 7? We fixed all that so it works again. It will not work to have three different speeds in the tail. It will cause the tail to jerk every time it changes speed. Driving it with Channel 7 you can set the speed you want on the tail, and it will ramp up using the same ramp time as the main. The difference is, you will be able to put a ground idle in your throttle curve if you want, and do a scale spoolup of the main by using the throttle curve.
Chris,
I did that with channel 7 for the tail. It is working and I can set the speed for the tail. That is all good. But I have my Main channel 8 with variable speed in mode 3 which I like. But the tail has only one speed setting which I can set for channel 7, as you say.
But with the y-cable I have a soft tail start up as well from the tail-ESC governor and also the tail ESC is getting the same speed signal as the main ESC gets. So the tail changes speed at the same time as the main Motor. I do see that as an option for my DDVP. It just needs to be tested in flight yet.
I am very happy what you did in mode 3 and please leave it as it is. But it is for the torque tube and belt tail the perfect option. I just don,t want to go back to those tails. I like my DDVP and will work around it.
Again, thank you and Bill what you have created. It is incredible.
Ah, ok. I’m sorry I misunderstood. You are deliberately throttling the tail rotor. I had mistakenly thought you were using the Y-cable as you did when the DDVP operation quit working in 3.4 without realizing it now works again.
Chris
I’ve been checking various stats on the heli:- (1).Total weight 4.38KG, (2) With the undercarriage on the deck, the Main Shaft is leaning forward 1.8deg. (3) To balance the Heli forward/back, I would have to add 0.13kg of weight to the nose. (4) If I remenber when I fitted the ESC, there was no way to vary the head speed, only by changing the gearing.
How would these figures affect the flight?
The weight is not an issue. The CG is minor, and is to be expected with a scale body. So they did design the scale body to give it more of a scale look with the rotor tilted ahead slightly in the frame. That is cool.
I think the main problem is too low of headspeed for the weight. I estimate you are hovering at 8.0-8.2 degrees of pitch. They will certainly fly at that pitch, and get slightly better flight time than speeding the head up a little. But getting that below 7 deg would be better. Experience has shown my most stable heli’s hover at around 5 degrees and slowing the head down makes them increasingly “sloppy”.
Do you have an idea what rpm you are running? What ESC do you have? Even if it has a governor, it should be able to be set for higher headspeed. Assuming you have the 1248mm rotor, you are at .73 lb/ft^2 disc loading and you would want to be at at least 1,900 rpm for 400 ft/sec blade tip speed. 2000-2,100 rpm would be better.
This is always a balancing act with electric heli’s. Low headspeed gets slightly more flight time, but has problems with pitch bobbing etc… But they don’t handle right running them too slow and it’s very difficult to tune the heli for a poor stability condition when the part that makes it fly does not have the authority to make timely corrections. The lift you get from the main rotor increases with the square of the speed.
Let’s see if we can identify what rpm you’re running first, and if there’s an easy way to change it (there should be).
I have an APP on my mobile phone called “Headspeed Tachometer”. The last time I used it, it showed 3155RPM. I did not trust the reading, so didn’t try it again. I will check it again to-morrow, and let you know what I get. I cannot see the ESC without removing the body, to see the make and size
I looked that ESC up and it says it has an optional programming card for it. But it does have a governor and it can be programmed with the transmitter sticks too. So there is a way to adjust the speed on it if you’re using the governor feature. It might be a “simple governor” like Align ESC’s too, and you could try increasing the throttle setting to see if it runs faster.
I’ve used that app on my phone before and it worked pretty good. It works on sound and it may have been picking up something else when you got your 3155 rpm reading - there is no way it is running that fast. When I used it I tied the heli down and put some pitch in the blades so it was creating lift and it seemed to be pretty accurate. You may have entered the wrong number of blades, or put in the wrong estimate of what you think the speed is. The app relies on that to discard other noises outside that range. I think you are running around 1,700-1,800 rpm judging by sound in your video. I would put the estimate at 2,000 as that only has to be +/-500 of actual, and see what it says.
it works best to lay your phone on the ground near the front of the heli so it doesn’t pick up the sound of the tail rotor quite so easy.
Chris,
I have 2 YEP ESC and the programming card.
In this link on Youtube https://www.youtube.com/watch?v=7e-HL5k8ojI the person is trying the Governor store with that ESC and the card for his SAB Goblin. It is by far not that easy and good as the Castle Heli ESC,s. But you can get it to work with a lot of trying.
I will use from now on the Mode 3 in ArduPilot FW for Heli only. It is very nice!
If your governor is disabled, I would highly recommend the Mode 3 throttle. It is one of the best new features for heli to come along in quite awhile. With the throttle curve properly tuned, it is perfect for scale models, either turbine or electric.