Hi
I try to config parachute function on Arduplane 4.1.4 ,which install on CUAV x7, by following this instruction. Parachute — Copter documentation
I use RC5 for triggering the parachute servo , which config to servo10.
the symtoms are:
- I can trig the servo manually only one time after reboot the FC. If I want to trig it again I have to reboot the FC.
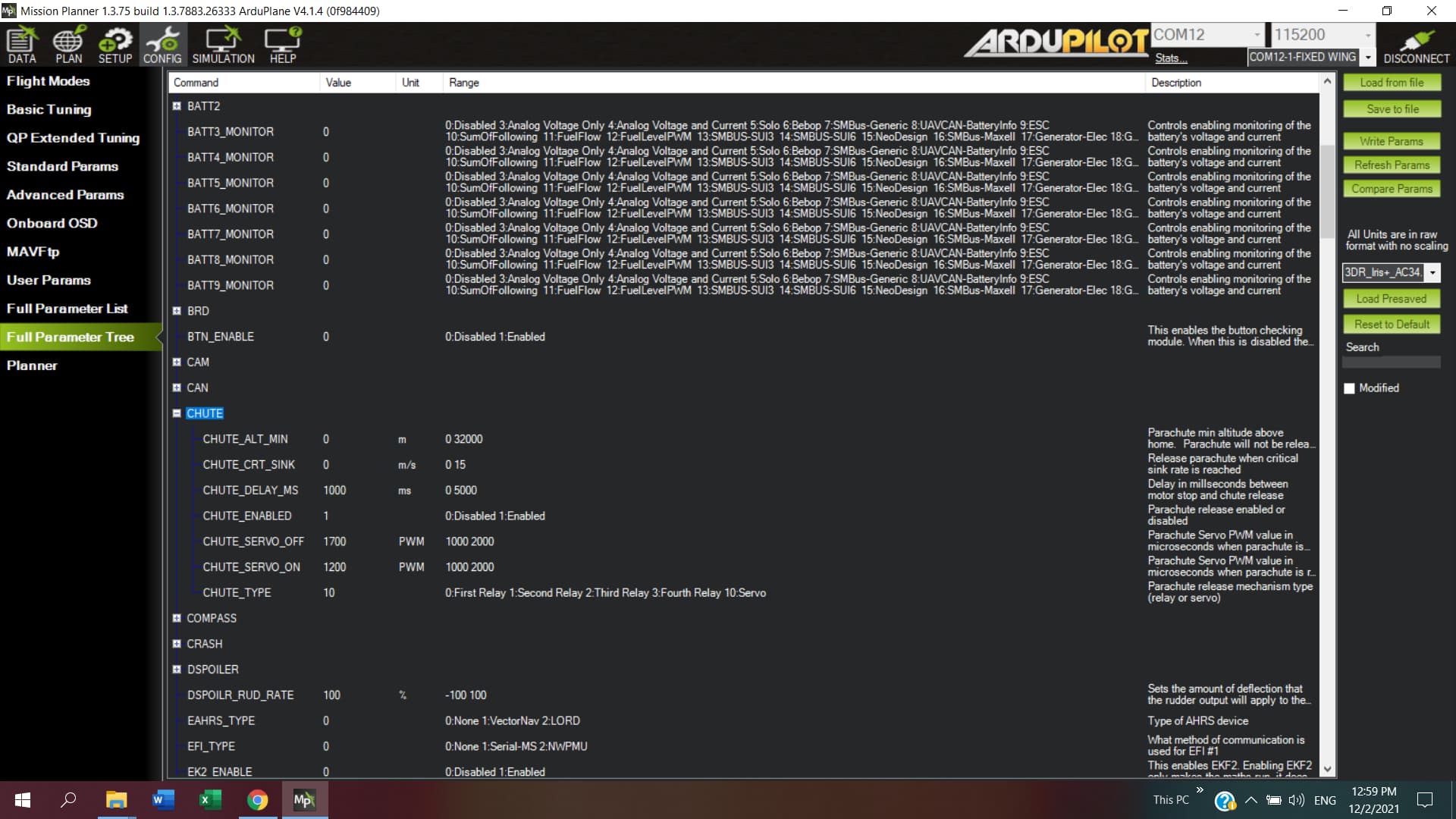
- According to the tutorial page, the engine throttle servo should be cut automatically before the chute servo is trigged, but ,in fact, it isn’t. The servo is only trigged about a second and going back to the off position. which means I have to cut the throttle manually before deploying the Chute. Am I right?