So I checked the tracking of my DJI props and noticed that props on motor1 and 2 (CCW) are tracking better than CW ones. There is little play on CW props and can be rocked back and forth a little. There is about 2~3mm difference in the tip tracking when i turn CW props But while in the air and loaded, they seem to track fine. No vibrations as seen in my log.
I just did second Autotune with the suggested values. Yaw feels much better now.Should i still double the ATC ACCEL Y MAX to even more reduce yaw overshoot?
Here is the log after the Autotune. Here is the parameter file.
Anything else you would like to get changed? Many thanks for your time!!!
It looks very good, ACCEL Y MAX came up to 24805 which is close to the calculated initial value, and the other PIDs all improved. You’ll only need to change it now if you are seeing some deficiency.
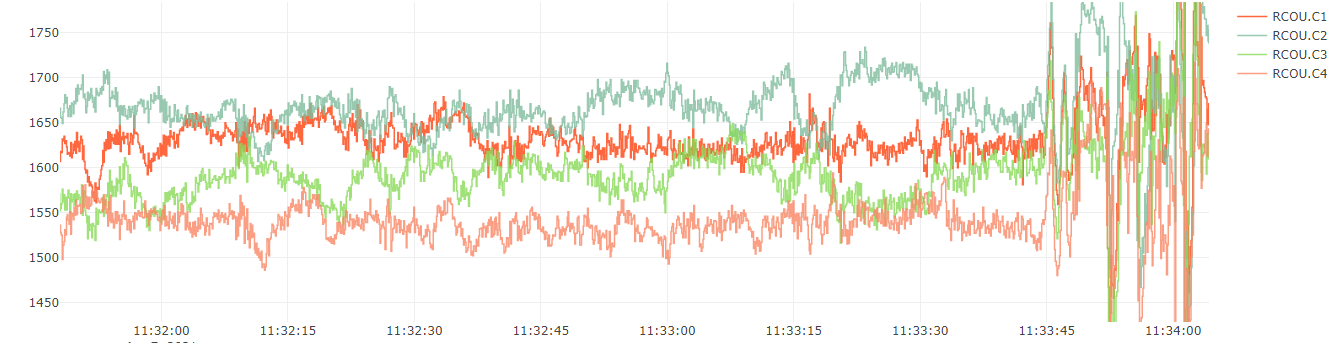
You’ve still got that motor imbalance though:
And if you wish to, you can get a slightly better overall tune by stepping through the Harmonic Notch Filter setup then run Autotune again - all axis at once, it would be fairly quick.
Many thanks Shawn for the guidance. I am really happy with the yaw behavior now. I will read more on the Harmonic Notch filter on wiki and will try to repeat the autotune.
Regarding the motor imbalance. I am totally stumped. I don’t know why they are not producing same amount of thrust. I think only way to make sure about the props is by using thrust stand. I do have a RCbenchmark thrust stand but then i have to de-solder motors from the ESC.I am gonna order one extra motor and 2 prop holders. One CW and other CWW. Then i will test the props if CW and CCW are generating same amount of thrust. Do you have an another idea how to diagnose this motor imbalance issue?
I recommend to test the motors as well. On a twin engine plane I had an issue with two expensive motors where one was 20% of from the factory given data. This caused a crash at take off for maiden flight.
Yes you are right coz i bought these “new” genuine DJI motors from Aliexpress but “removed from the phantom drones”. So it could well be that these motors had some issues.
I will test each motor on the thrust stand then. Thanks.
Just checked Master Airscrew props and they look pretty good. Foldable and efficient.I didn’t know that they make props for DJI. Thanks for the tip Shawn.
Another question. Do you think ESC can cause thrust imbalance? I am using “Holybro Tekko32 F3 35A ESC BLHeli_32 3-6S”
Using DSHOT no, the ESCs should be running the motors at commanded RPM. The difference in commanded RPM is coming from the flight controller correcting for a physical issue.
Weight imbalance shows in two motors next to each other, Yaw imbalance shows in opposite motors.
I installed my gimbal after auto tuning my quad without it. It’s hanging on the rubber dampers.
Now i am facing one problem. If i give my quad a quick movement from left to right or front to back or vice versa, it just drops from the sky in stabilized mode. If i move it slowly, it remains stable and all the movements are crisp. Even Yaw is crisp if moved slowly. But if I yaw it too fast, then it just gets crazy and quad drops a little while trying to stabilize self…
I’ve built a quad that balances camera+gimbal with the battery. Then I searched for a piece of metal that equals the camera+gimbal weight, and I zip-tie it in place for every tuning, testing or training flight. It balances the quad, ensures all motors are working even and makes for a crisp picture when analyzing notch filtering. Motor PWM averages are all in a 50-unit margin, after a flight.
But I have zero experience flying LiIo, instead of LiPo. There’s transient instant current demand spikes from motors that you can’t plot on graphs. With LiIo there’s sometimes uncharted territory. If it handles slo-mo well and gets weird in hard maneuvers, maybe your Ion cells can’t cope.
[LE]. Manufacturers say an electrolytic capacitor is needed on ESC input leads only in 6S scenarios. Try adding some 1000 uF 35V low-ESR to your ESCs see if they help.
I couldn’t check logs from where I am now, but the fact that it “just drops from the sky” implies there’s either a major tuning issue or you’ve got motor/ESC desyncs (a hardware issue). Or the aircraft is underpowered and losing altitude while trying to maintain stability.
You might want to change these to suit your gimbals capabilities:
Thanks Dave. Yeah just realized that motors PWM was maxing out. Looks like li-ion are not for this quad as its little on heavy side.Will need to use lipo only.
Thanks Shawn. I will try to play with these parameters you suggested. But as Dave said motors are maxing out. I will run a test again on lipo battery and see how it behaves.
Thanks for the reply. Yes that’s exactly what i did when i did autotuning on my quad without gimbal.I used dummy load to Autotune.I have already installed 2200uf low esr when I built it.
But your LiPo battery suggestion has a point.Looks like my motors are maxing out when voltage drops to around 3v.I am gonna try LiPo battery.
It was the Li-ion battery. Changed to li-po and it feels and flies like on rails even with the gimbal. Thanks everyone for helping me to tune this quad.
So to my another issue of motor imbalance. I corrected my 2 motor orientation using shims and now they are perfectly perpendicular to the frame. Even though the difference was minor but i still used .005" brass shims to correct it.
Unfortunately i am still seeing my cross motors (1-2)are not balanced to the other cross motors(3-4). I can see that RPMs of (1-2) are not similar to the other cross but motors (3-4) but RPMs of 1 and 2 are same and RPMs of 3 and 4 are same too.
So does it shows that its not the motor issue? To me it looks like prop issue. Am i thinking correct? Please suggest. Thanks.