Hopefully Dave could help you out here, From my point of view it looks good. Sorry to say but I am not that experienced so lets hope for guideance lead up to Autotune. Regards Espen
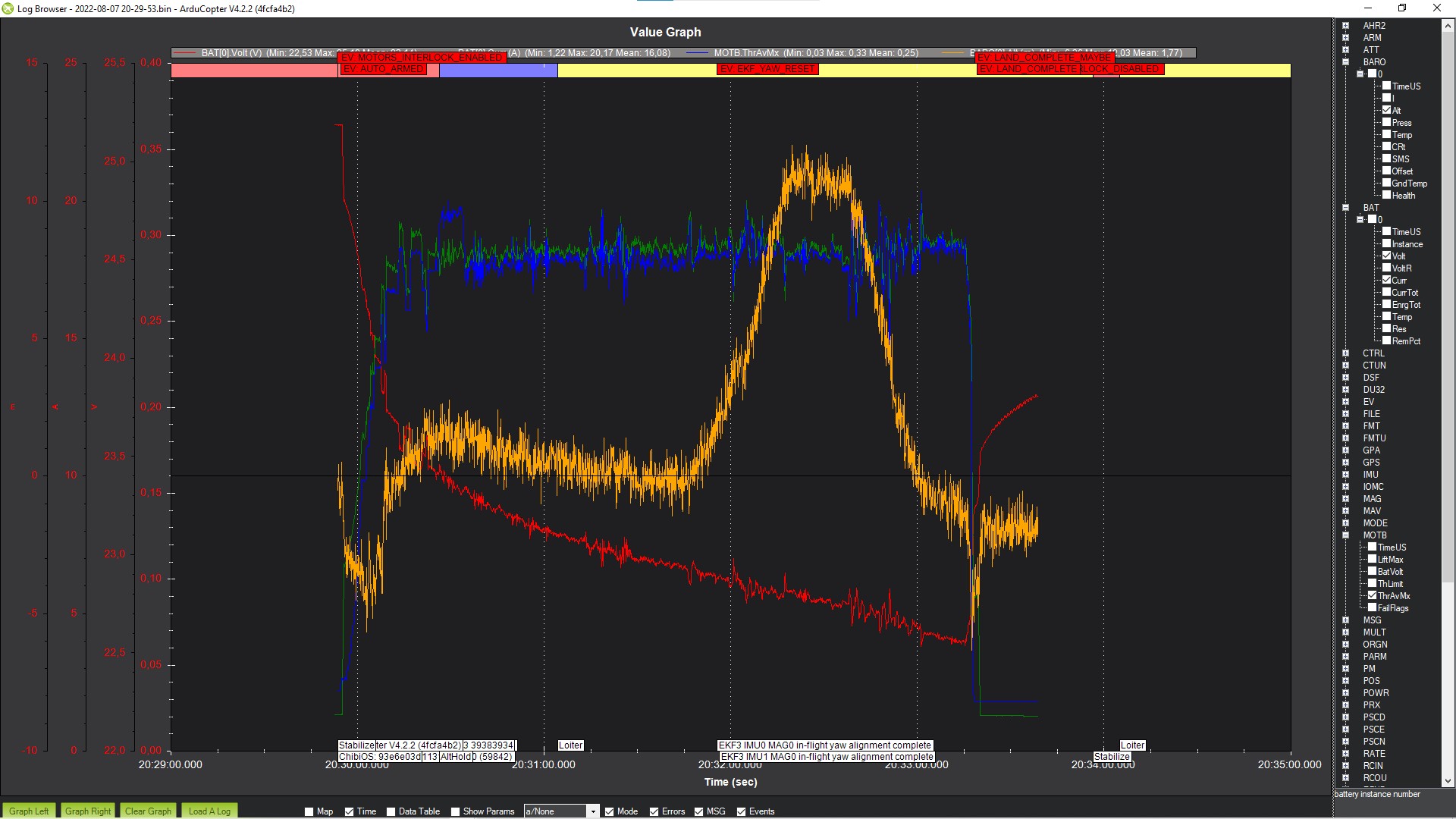
I looked at your log. Your motor pwm signal is around 1500 almost the entire flight. This suggests that you are hovering at around 50% throttle. So that’s weird.
If you are flying on default parameters you should change those and do the initial setup. Maybe the copter flies worse than but to get the ultimate performance you need to start there. I recently had an issue where my quad flew worse on the initial parameters than the default once. But with Daves help it turned out to be a motor that was mounted at a slight angle.
Your issue could be many things but the best way to start is to make sure that the copter is setup correctly before tuning and flight.
I would suggest that you set the initial parameters, maybe even wipe the FC and start over on blank and do all to setup according to the wiki. If you set up all the hardware and than the initial parameters. You could than post a log file here and get better help.
But wait for Dave to look at the log file as well. His the man!
Not much to look at here as it’s essentially on default parameters and no attempt at Initial or otherwise tuning has been done.
And I’m not sure what issue you were trying to address with a negative MOT_THST_EXPO but certainly set that back to default and then follow these steps:
From Mission Planners Setup>Mandatory Hardware>Initial Parameter Setup enter the prompted values and make the changes.
Then prepare to configure the Dynamic Notch Filter.
The run Auto Tune.
Reference Wiki entries as follows:
Tuning
Dynamic Notch Filter
Auto Tune
2 Likes
Tomorow I reset FC to rover and again to hexa, as I read that should reset all settings to default. Am I correct? That should give me fresh start if there was some old setting which wasn’t correct.
Than I can set all hardware and we see what is going on. Before on initial parameters it even can’t start and olny flip over its back and thats all.
The initial params dont affect anything that would make it flip (or not)
The flipping problem is something to do with motor order or spin, ESC calibration or possibly faulty ESCs.
I would do that, than you know exactly what you have changed. Make sure that all the hardware is working correctly as well. Make sure that the fc is mounted correctly and that the weight is distributed well on the aircraft.
You could test the motors with the propellers off with the motor test tab under additional hardware in the setup tab. Just to make sure that all the motors are working as intended. Listen for weird noises and so on.
Ok I installed rover firmware, than hexa. I set all initial parameters and peripherals. Calibrate accel, radio, esc, compass. I set initial parameters 9” props 6S. I checked motors order and rotation is fine. They start constantly about 11% and rotates in good direction. I set mot spin arm and min for proper values (+2,+3%) as in prompt says. I set for now stabilize,althold,loitier modes. I left suggested geofence and other things like battery failsafe. I set battery monitor to externally measured values to make them as close as possible to real values from multimeter. I set gpses with blending and turn on obstacle avoidance. I checked proximity front sensor ctrl+f and is working correctly. I test it later and post some from flight logs.
I also add that ins log bat mask to record logs for filter.
Trhottle expo is set for standard value I didn’t change it at all (or it was set by initial parameters setup).
Pixhawk base settings.param (17.1 KB)
OK, that’s what I got this time. Parameter list after first flight and log from it.
I’m really suprised how was this time. So for sure I had some missed parameters from previous Pixhawk copter. After I install rover and copter again and setting it from beggining, this time all was fine. I have to rise a little mot min and mot arm to clearly spin propelers and that was all changes I made to make it fly in stabilize. Throttle is back where it should be! YAY at least. So I can make test in Stabilize, after that I changed to AltHold. It driffts a little to back but that could be because of some wind. Overall feels quite stabile.
I should start with that ealier.
I add that INS_LOG_BAT_MASK for first two IMU. So maybe now I can set that Harmonic Notch Filter.
OK so what should I to do next with it?
1 Like
Good start! Yes, Notch filter config is next. This is what you are working with:
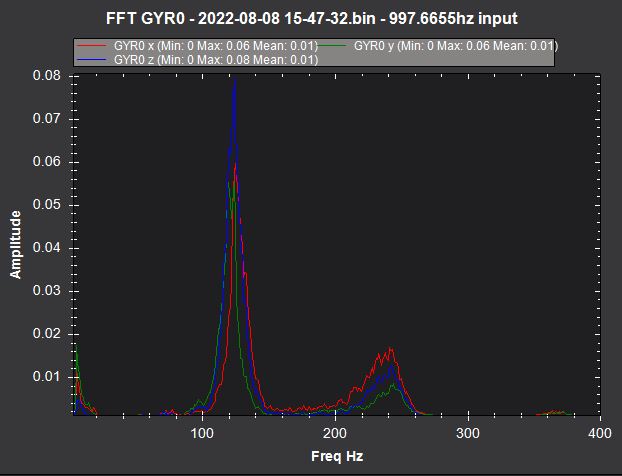
So, the 1st harmonic is at 124Hz and you have one harmonic of that. So center frequency at 124Hz, bandwidth at 62Hz, 2 harmonics and set the throttle reference to MOT_THST_HOVER. Then set INS_LOG_BAT_OPT to 2 and make another hover flight to see how it’s working. I would set these also before flying:
INS_ACCEL_FILTER,10
PSC_ACCZ_I, (to 2X MOT_THST_HOVER)
PSC_ACCZ_P, (to MOT_THST_HOVER)
Note: You don’t need to log both IMU’s it just makes a larger log and doesn’t add any value.
2 Likes
That’s what I got now.
No way to know if it’s working w/o setting INS_LOG_BAT_OPT to 2
And set this to 1 INS_LOG_BAT_MASK
I was sure I set it ![]() OK… next test flight:
OK… next test flight:
Hope this is ok.
Yea that’s good, working well.
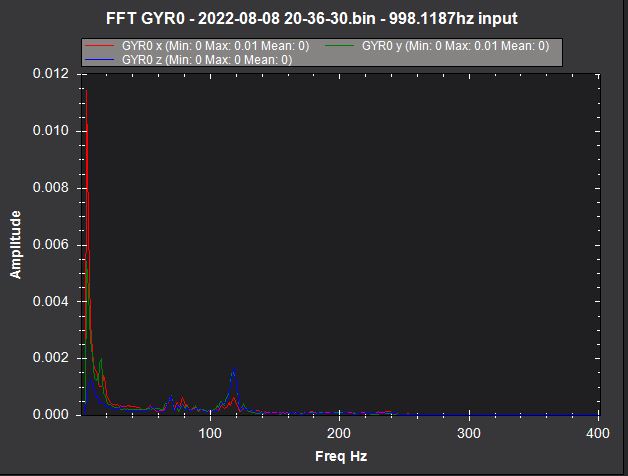
Ready for Auto Tune if that’s your plan.
Plan was quite simple to replace old APM and make it more modern and add some functions (object avoidance, better compass, better GPS, OSD, Telemetry) which was obviously not reachable with APM. I found some used Pixhawk with good price, and I think that was my previous problems with throttle level (I install new firmware but I for sure miss something what’s left from previous builds.
So for now it’s going to be more complicated but going in good direction ![]()
Yes I want to autotune it… But first I have to read how to do this properly. And I have to take hexa to some more open space to make sure it has enought room just in case ![]() Maybe I start with it tomoroow, and better I check 2x I set proper options and they didn’t disappear somehow.
Maybe I start with it tomoroow, and better I check 2x I set proper options and they didn’t disappear somehow.
Can I calibrate accelerometer again? Without changeing something and left all previous setting. I think It wasn’t set ideally so I want to make it one more time for sure.
And Is now ok to turn off that INS_LOG_BAT_MASK?
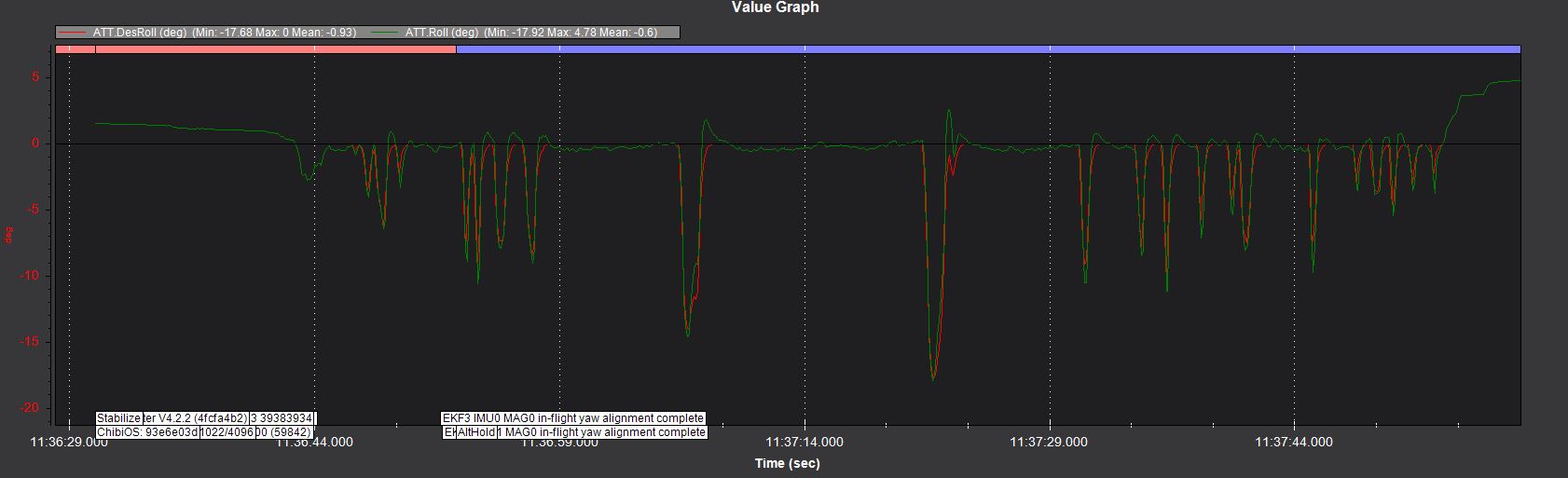
Sure, you can calibrate the accels again. Something did look a bit off in your last flight as the roll inputs were all one way. So either it was windy or there is an accel bias or both.
Yes, you are done with the Notch Filter configuration.
1 Like
It was light wind, I think. And in AltHold it driffts a little to rear right so I have to correct it. Maybe that is why it looks like that? I don’t have to much space in backyard so I have to correct it more frequently. Or accelerometer calibration wasn’s good enough. What do You think?
It could be just wind but an accel cal doesn’t hurt.
I think I go for autotune each axis separatelly if it’s possible, don’t know how much time it takes. First time for me to do this, hope it works. Is there anything left after autotune? Or is that all for that “basic” setup? Ok maybe I can tune it better after some time I learn some more how it works.
I calibrate accel again, without landing gear, so frame should be exact at level. On APM that was good enough, and maybe landing gear isn’t exact level.
Wind tooday was about 1,29m/s. 149 degrees.
Hi Michal, yes its possible to do Autotune for 1 axis at time. I did only Roll, last about 9minutes.
To calibrate level its the motors tops that create the plane that you shall ensure is in level before hit calibration. Use a spirit level and adjust below legs so the plane is horizontal level. Regards Espen
That depends on each individual craft. Some produce great results from Auto Tune, others require further manual tuning. Your vibration levels are low so the likelihood that Auto Tune will work well is higher.