The tuned values won’t be saved unless you are in Auto Tune when it’s disarmed. Don’t switch out of it. When it completes land and disarm, simple as that.
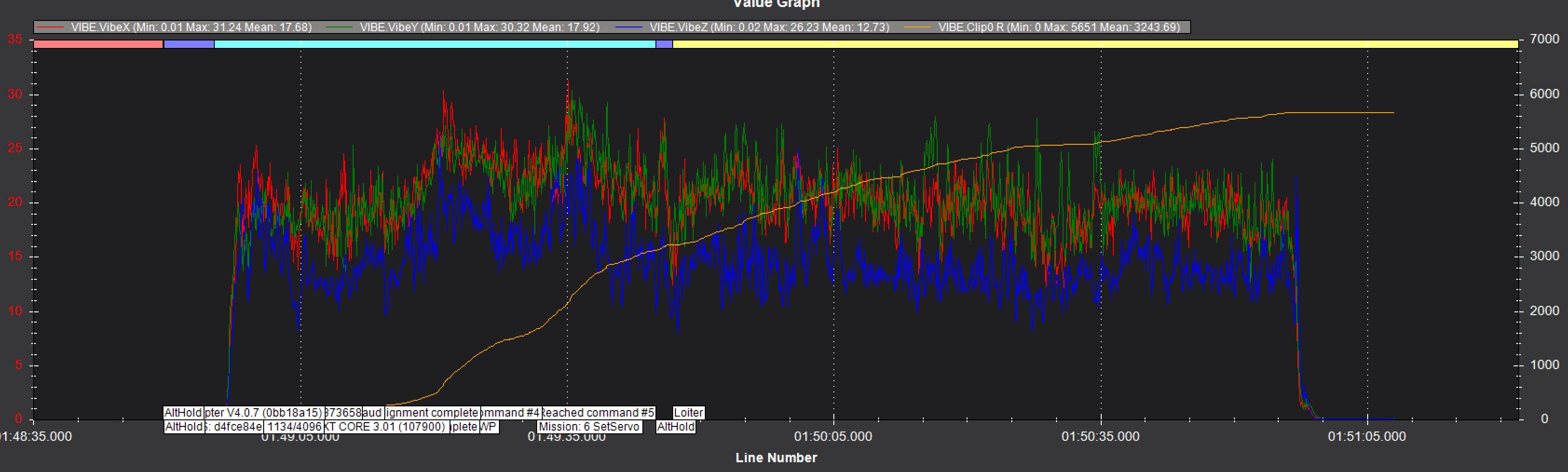
But you need to fix the vibe levels and configure the Dynamic Notch Filter before running Auto Tune anyway.
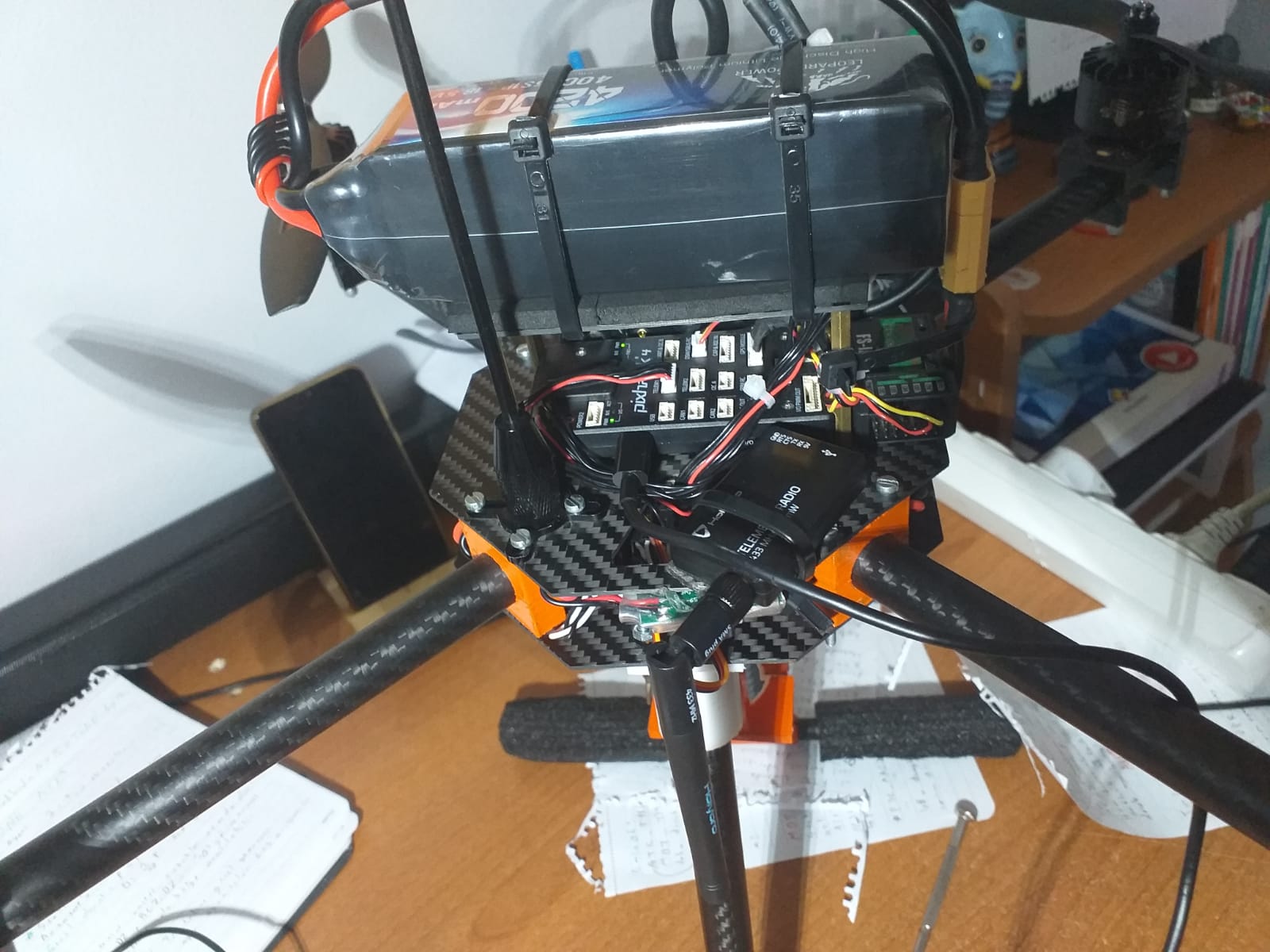
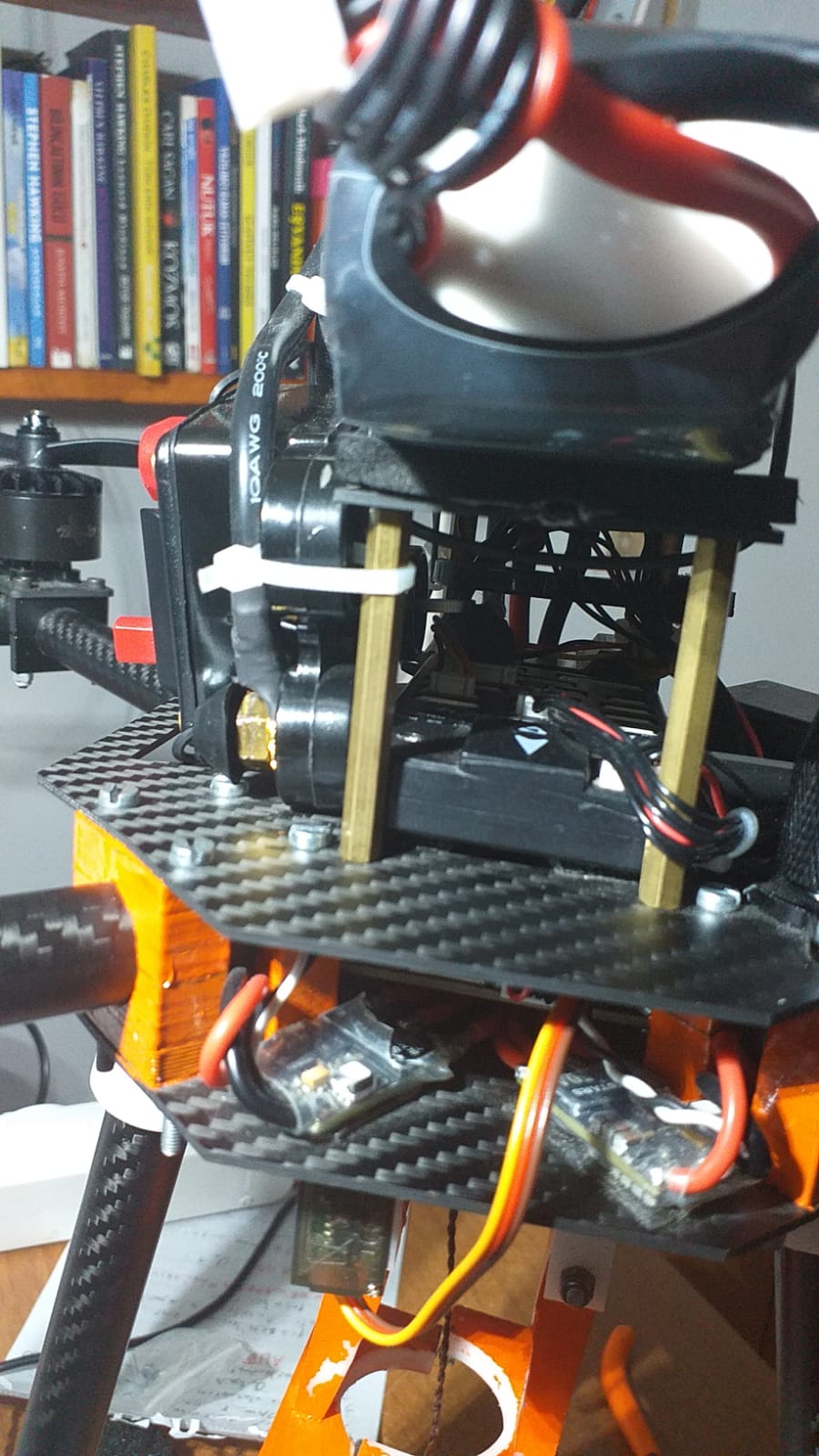
Yea, thin CF. 3rd time, how is the FC mounted/attached to the plate? Double sided tape, foam tape? You will probably need an antivibration mount of some type. Is that battery plate mounted to the same plate as the FC with stand-offs?
I guess it will be a throttle based setup.
INS_HNTC_MODE =1
INS_LOG_BAT_MASK = 1
INS_LOG_BAT_OPT = 0
I did INS_LOG_BAT_MASK = 1, INS_LOG_BAT_MASK = 1; Or should I just do this?
I’m going to fly now.
I didn’t see the article, I did as I said but I made minor changes in the drone and it was better. https://drive.google.com/file/d/16F02DZQCLatMWqmozMvxQsGqMI6_6qxk/view?usp=sharing
Also, I will autotune tomorrow, then autonomous flight, my last day for the competition.
I have two questions, I would be very happy if you answer.
I have a second battery of 6000 mAh. This battery is heavier. If the auto mode does not end with the first battery, will it be a problem if I do the other axis with the second battery?
In the articles I came across on the forum, I read something like “I need to upgrade to beta version for speed”. Is this for racing drone, my drone can reach a maximum speed of 60km/h= 16m/h according to eCalc site. Can’t I reach these values in version 4.07?
 .
.