Hi. It has been a while since I last posted due to obligations. It is heartwarming to see how ardu heli is developing and especially thank you Bill for your persistence and hard work.
I upgraded my 800 gas helicopter from fw v4.0.6 to 4.1.5 after which I experienced severe oscillation in the roll axes (in auto mode). I only tested in stabilize, alt-hold, and auto modes. I then rolled the firmware back and tested auto without problems. The biggest difference I can see between the firmware versions is the change from EKF2 → EKF3. The hardware is CUAV v3 (fmu3).
Without redoing a full tune, is there a particular setting I can focus on to correct for the oscillation in roll axes?
Is it possible to be a filter issue? I did notice that the governor is much smoother in 4.1.5 as well as an improvement with the compass error.
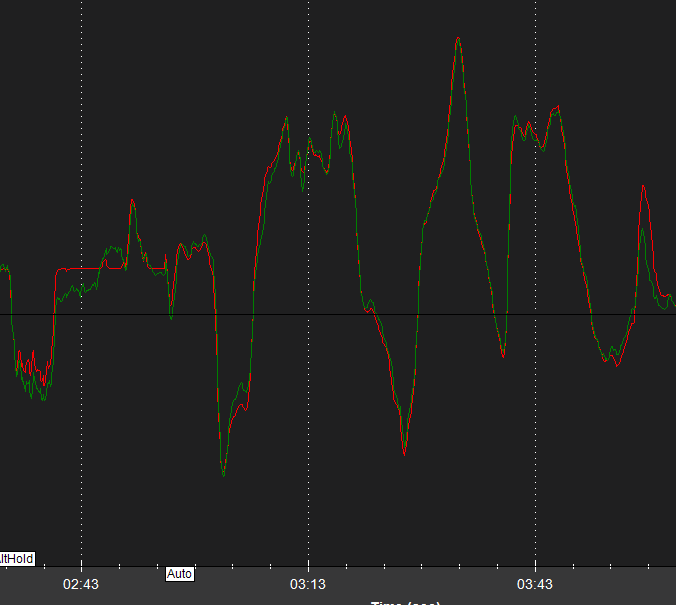
DesRoll vs Roll - 4-0-7
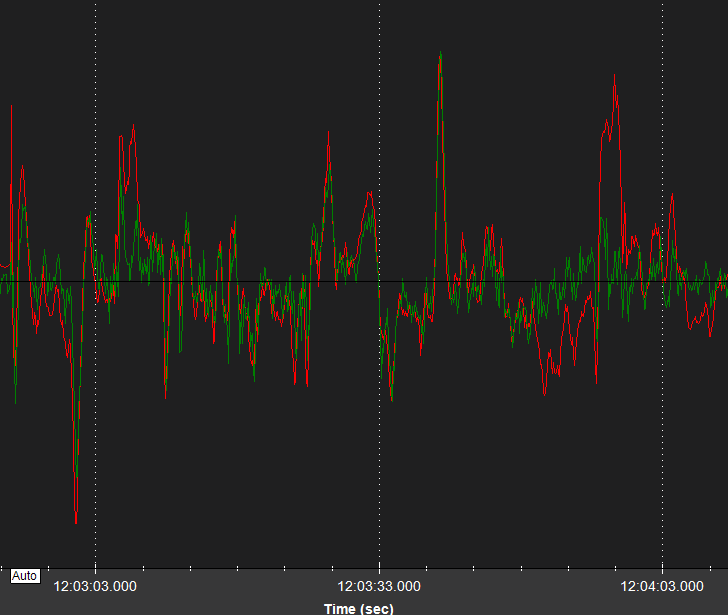
PID.R Tar vs Act - 4-0-7
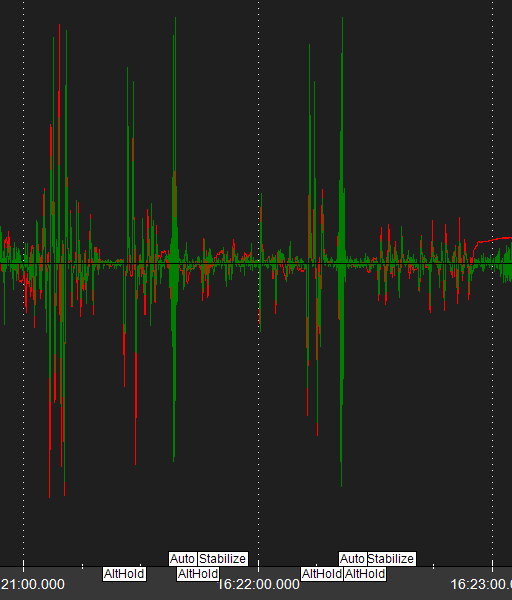
PID.R Tar vs Act - 4-1-5
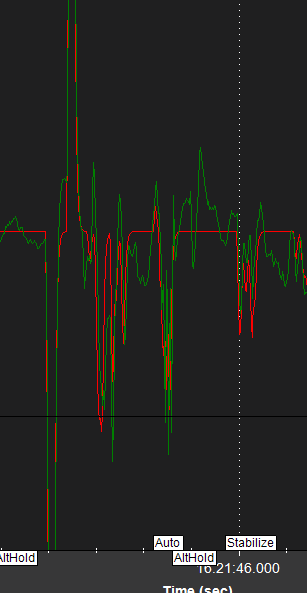
DesRoll vs Roll - 4-1-5
Link to the two log files; ArduHeliLogs - pCloud
Any help will be appreciated. Thank you.