I am trying to build an FPV drone. It’s an X frame quadcopter with F40PRO Ⅳ KV2400 motors and T5146 Tri-Blade propellers (5’'). It has a 4S 10000mAh battery. The total weight of the drone is 1.6Kg.
From what I’ve understood from the motor datasheet, the motors seems to be well suited for the current configuration.
For the first flight I’ve used the recommended parameters from MissionPlanner.
I’ve tried to take off the drone slowly in STABILIZE_MODE with MOT_HOVER_LEARN = 2. However despite I’ve slowly slided the throttle stick to about 80%, the drone was barely lifting from the ground. After trying this for 45s I’ve stopped the drone, an then, I felt an intense smell of burned electronics coming from the drone. I’ve quickly runed to grab my thermal camera and checked for any hot spots and saw that the motors reached about 250ºC! I took a closer look to the motors and I’ve noticed some motor coils were burnt…
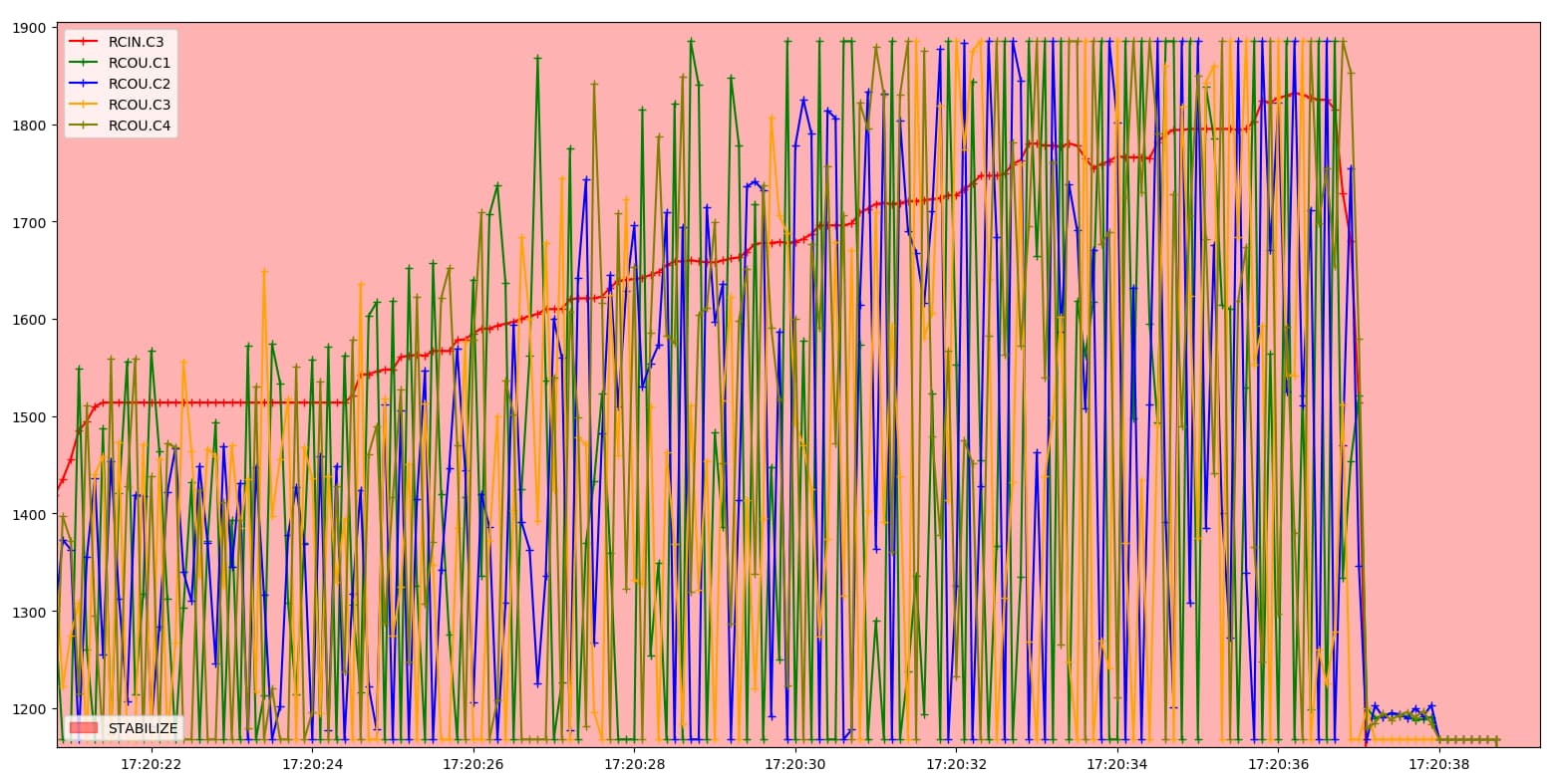
It seems that the output to the motors is almost always ON/OFF but I can’t understand why. Can you point me some directions on what to look for? What other tests may help to understand the source of the problem?
PS1: I am very new on the drone subject so I apologize for any stupid and obvious mistake I might be doing and I want to thank you in advance for your time.
PS2: Dave, thank you for the quick reply to my incomplete question (I’ve used the wrong keyboard shortcut to enter a new line and so the post was submitted too early.)
Those motors and propellers are something you would put on a lightweight racing quad not a 1.6kg machine with a 10,000mah battery If they are burning then they are probably overloaded.
1st update to latest Stable, the firmware you are using is old.
OK, the take-off-weight could be quite a bit lighter as @geofrancis suggests. I would put a battery in there that is 300g less weight at least. But in the mean time let’s get the oscillation reduced so you don’t smoke those motors.
Set these:
ATC_RAT_PIT_D,0.003 (perhaps lower)
ATC_RAT_RLL_D,0.003 (perhaps lower)
INS_ACCEL_FILTER,10
These are way off base:
PSC_ACCZ_I,1.24 (change to .40)
PSC_ACCZ_P,0.62 (change to .20)
Note: with a 2nd look it’s not actually clear what the Hover throttle is but this is the correct ratio. Try it anyway.
Need to configure the Dynamic Notch Filter so set these:
INS_LOG_BAT_OPT,1
INS_NOTCH_ENABLE,4
Then do another hover flight in AltHold for a minute or so and post that log.
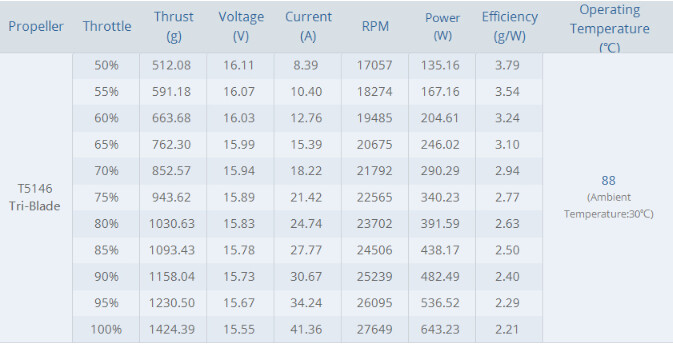
Thank you for the feedback, I don’t see how the motors can be overloaded. At a 1.6Kg, each motor should be putting out arround 400g thrust each to hover. If we take a look at the motor’s specifications:
We are below the 50% throttle
trying to get high thrust from small propellers is really inefficient so it generates a lot of heat. What motor charts don’t show is what the motors can handle as a sustained load without overheating. This is why most (non drone) electric motors always have 2 ratings, one for sustained load and a peak rating.
We will know more when this craft will hover without major output oscillation. Then a MOT_THST_HOVER value can be determined. From the log if it’s not learned during flight. This can be D-term oscillation, Rate P&I too high or Acceleration Vertical Gain P&I. Or a combination of all 3, 2 of which I addressed in the previous post parameters change suggestions. You had already lowered the Rate P&I so let’s see what happens next.
Note: So eCalc predicts 50% throttle at hover which in many cases is fine. But it also predicts high motor case temps. Granted those temps are under high demand so slowly cruising around may not be a problem. But for these types/size of craft I still think you should shave ~300g of weight. I have a few craft in the 4-7" range and even the “Long Range” versions have hover throttles ~40% or less.
I agree, I changed the firmware to lastest stable (i think 4.3.3), reset all parameters to firmware default, and did the initial parameters step on mission planner. As a result, the drone did manage to hover (i did not get to calibrate the current sensor so the readings are not viable).
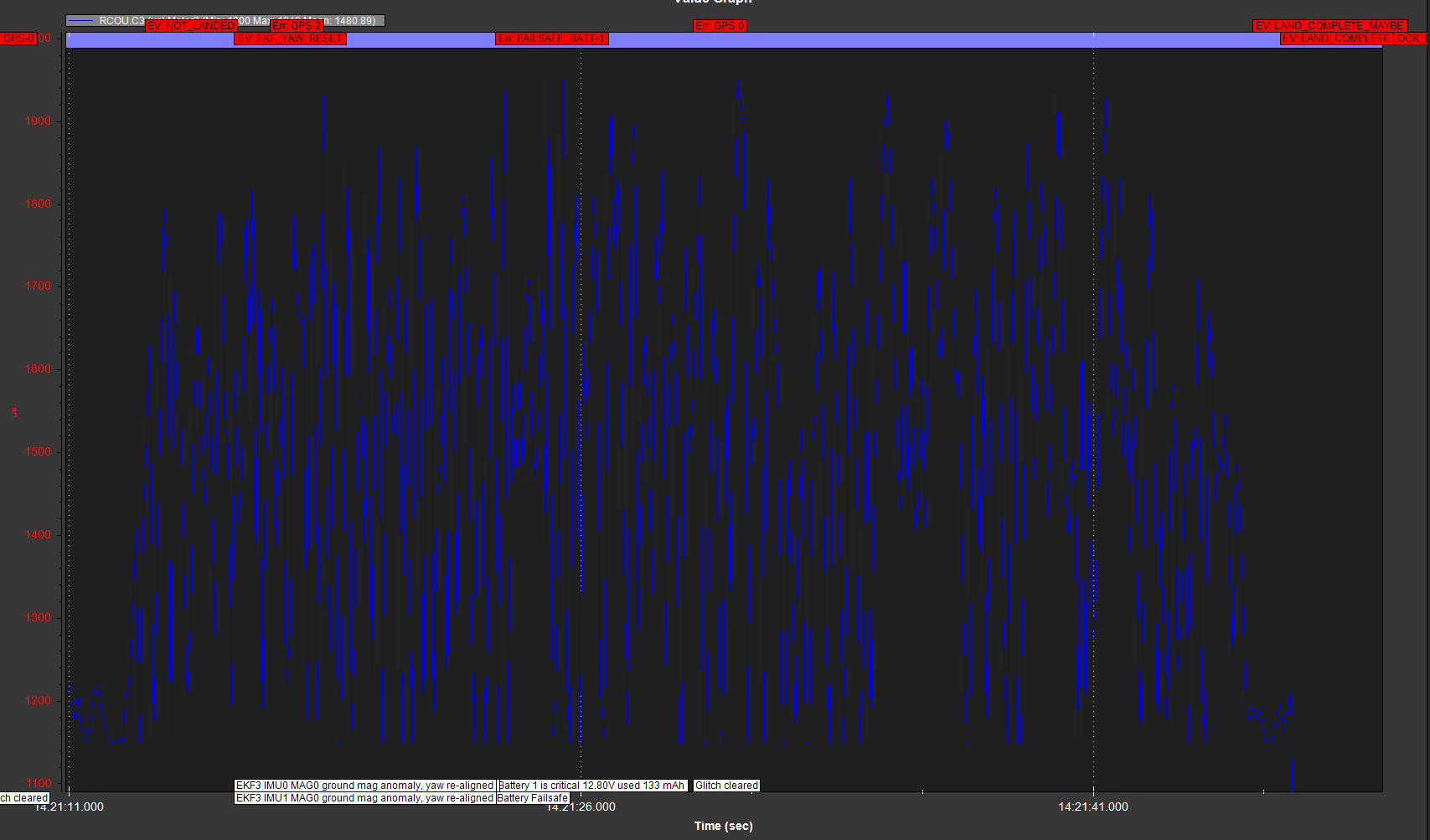
The motor outputs are still way off, and that is what i belive to be causing the motors to overheat. I understand what you and francis are saying, however, TMotors states the oerating temp. of there motors to be ~~90º, which coincides with what eCalc is saying and should be fine. The problem is, the temperature is not 90º, it reaches 160º after a minor hover. (find the logs here: WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free)
Any suggestion to how we can reduce these crazy oscilations:
Other than this, I am using a 4in1ESC ( Tmotor Velox V45A 6S LITE), so I will also be trying to use individual ESCs (i think i have a few air40 arround) to see if it helps to reduce the wiring size from ESC → Motor.
Yea, I already gave those to you. But try these:
Cut the Rate Pitch/Roll PID values in half.
INS_ACCEL_FILTER,10
Disable the Notch filter, it’s not configured.
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
MOT_THST_HOVER,0.32
PSC_ACCZ_I,64
PSC_ACCZ_P,0.32
Then make another hover flight. AltHold should be close to center throttle but if you hover for a minute or so a new one should be learned. Assuming the oscillation is greatly reduced.
The battery voltage is sagging to ~12.5V simply trying to hover. What battery is it?
Is that ESC BLHeli_32? If not replace it with one that is.
That’s a BLHeli_S (budget) model. You want a BLHeli_32 ESC so you can run the bidirectional version of firmware and use Dshot protocol. I don’t buy T-motor stuff typically but I have a F55A Pro II in a 7" and it works well.
After cutting rate PIDs in half and uptaded values as you suggested, there seemed to be an improvement, but there is stil a lot of oscilation in the control.
Please listen - both the motors and prop size are not ideal by a long shot for 1.6Kg quad. Your ideal prop size is 9-10”, though you could go down to 7”.