I am attempting to fly Chibios on a Small 4 channel powered glider using the Omnibus F4 nano V6.
Motor/servo 1-3 function as expected, Motor/Servo 4 doesn’t function as a servo for rudder. Servo 04 function is set to 21, On the servo tab rudder moves as expected. Just no output to a servo though.
I would like , but not really need stabilized rudder/yaw.
But I do want at least Pass through rudder which is easy enough if connected to the receiver directly.
I worry though that in stabilized flight modes that the flight controller will resist yaw and the yaw the rudder produces.
Ok this is what I found that may shed light.
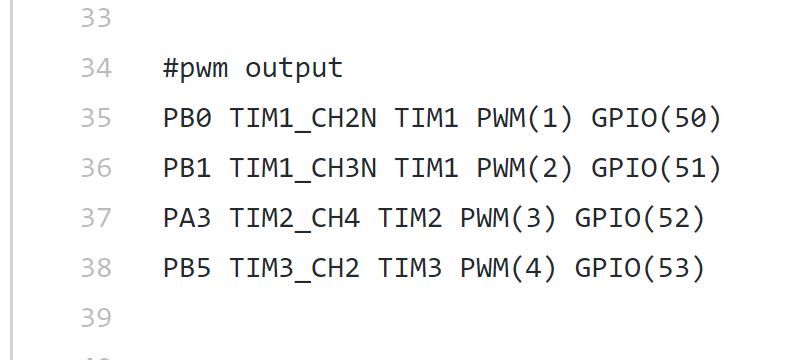
All motor/servo outputs are Dshot and PWM capable. However, mixing Dshot and normal PWM operation for outputs is restricted into groups, ie. enabling Dshot for an output in a group requires that ALL outputs in that group be configured and used as Dshot, rather than PWM outputs. The output group that must be the same (PWM or Dshot, when configured as a normal servo/motor output) is: 1/2
So it appears…no I don’t understand. I don’t know except it is able to control each of 4 motors in a quad. Why can’t it control 1 motor and three flying surfaces in my 4 channel plane? I also wonder how this differs from the Omnibus F4 V.3 which is easily configured for 4 ch use?
You could put a Dshot ESC on output 4 and configure with the SERVO_BLH_OTYPE parameter. Then use the other 3 for servos. There are parameters for your use case. I use one of those FC’s on a Multirotor but have considered its use on a plane I have with an antique APM.
I don’t require BLH and my ESC is an older multi rotor type configured as PWM functioning currently. Even when I tried setting it up for a flying wing, channel 4 had no output…very odd. But my understanding is very limited.
Ah, I thought because you mentioned Dshot that you wanted to split the groups to use it for the motor. So ignore all that about groups it’s something else because you have configured for default (PWM) on all. You have default RC mapping but your Servo outputs are not. This could work just an observation.