Up to now every flight of the Journey has been fine, right out of the box. Today was different. I wanted to do a simple low altitude hover time endurance test. The first run was at around six meters and looked fine for several minutes, then it started gyrating wildly and basically fell out of the sky (no damage – tough little guy). Dataflash messages:
|14:35:49|New mission|
|14:35:49|Frame: QUAD|
|14:35:49|GPS 1: detected as u-blox at 115200 baud|
|14:35:51|EKF2 IMU0 ground mag anomaly, yaw re-aligned|
|14:35:52|EKF2 IMU0 in-flight yaw alignment complete|
|14:38:19|Crash: obstruction landing (0)|
|14:38:22|Tmode: action3: 18|
|14:38:22|Tmode: Force disarm|
Battery was still at about 3.75 when this occured (FS is at 3.64). Event resulted in mode changing from 5 to 9.
I continued with the same battery without recharging.
My guess is one of your motors might be worn or not turning smoothly. But need to see log file. Check your motors are tuning smoothly.
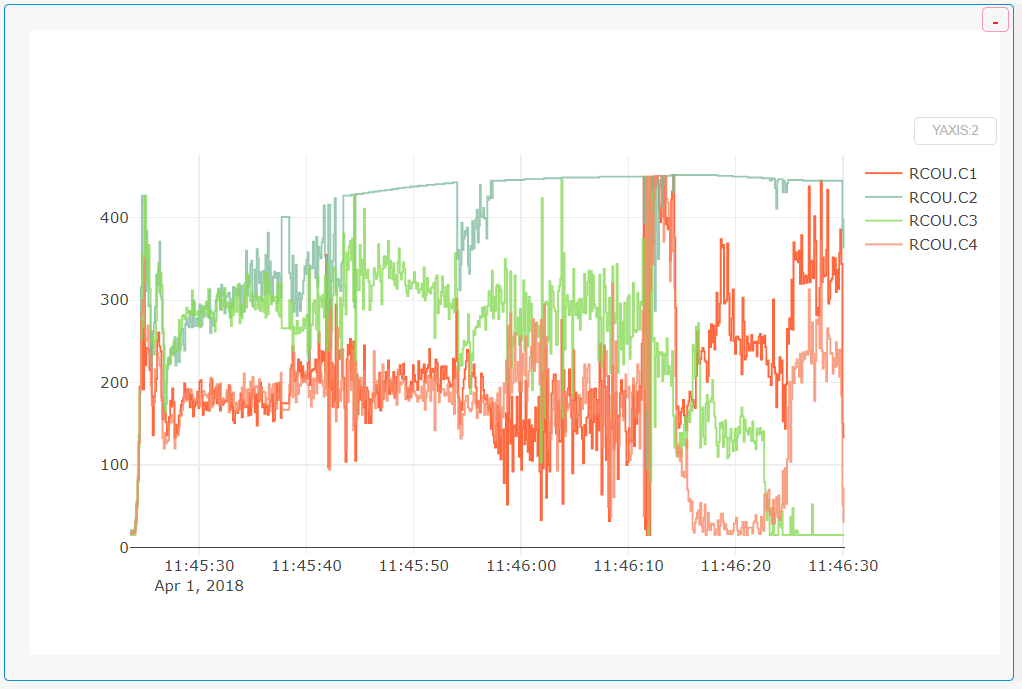
You can map RCOUT 1 - 4, may see one of value stays max like attached. This graph shows ‘throttle’ to each motor from flight controller. C2 graph line stays at top where other motors throttle are busy to adjust. This shows , means C2 motor is not giving enough power even at full. Cause is the Motor may be worn or gear is not turning smooth etc.
If the motor cannot give enough power to keep attitude, copter will land there.
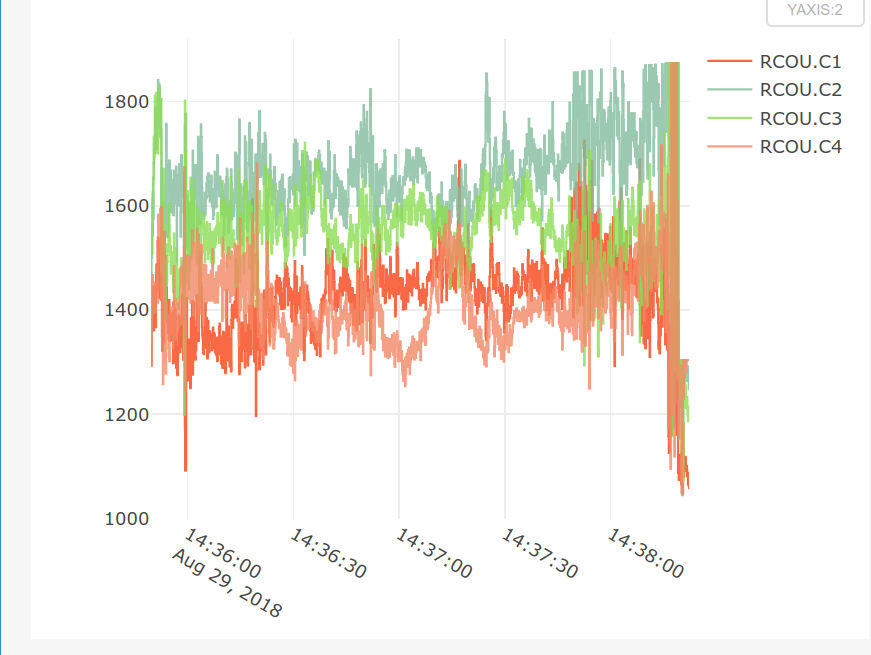
Hoping nothing is worn out already – it’s practically brand new and has very little flight time so far. Here’s the graph from that first segment I posted (the second one may have been due to the battery voltage dropping so rapidly it couldn’t RTL – but there was plenty of battery left at the end of the first segment).
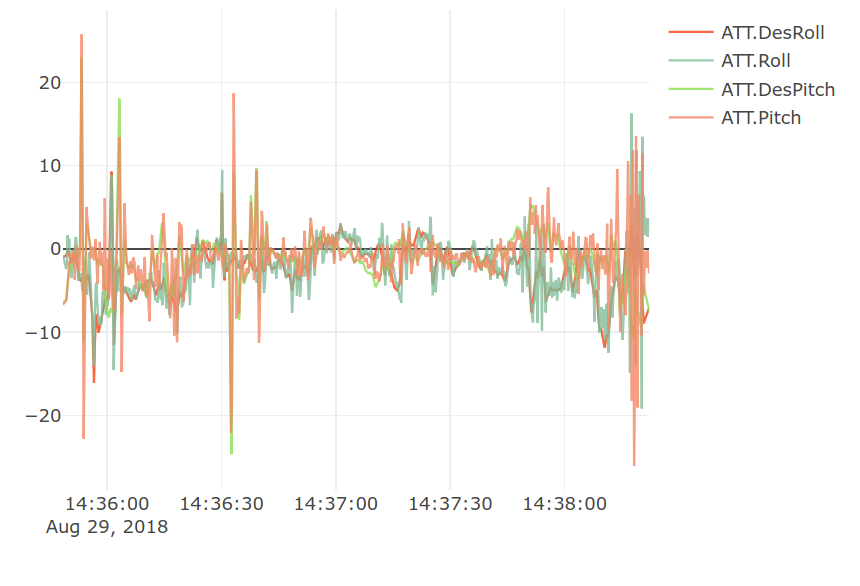
Looking at my first segment graph again, I’m contemplating the possibility that I got into a VRS. This quad is much lighter than what I’m used to flying, and apparently that can increase VRS risk in some situations. The rapid power drop that brought the quad down in the second segment (apparently without triggering RTL) is probably a completely different issue.
Hi @TT300, thank you for posting graph. Did your copter started to drop between 14:37:30 to 14:38?, if so, RC OUT looks very ok, only got full throttle during rapid decent.
VRS maybe, I have not encountered it myself, not familiar with it.
Yeah, I think that was where the sudden, bad wobble began. And then I applied more throttle, which is exactly what you’re NOT supposed to do during a VRS event! Apparently while VRS is usually associated with descents, it can occur during hovers also, and the small size of the quad can exacerbate this. I’ll run another test today.
I would visual check prop gear and pinion very closely to see if there is any binding or chewed teeth. Spin props by hand to feel if there are rough spots in the drive . From experience with the 2450 gps , I have found the gears to be veRy fragile at times. Plus micro high-speed brushed motors have short life around 300 mins total run time . I have had similar issue as yours happen to myself different times and it was bad gear/ motor. Also if jJourney has thever Web API you should try running a lower power motor test a few cycles and you can see if one or more motors behave different .
Off topic perhaps, but is there a method to know total run time of SV2450GPS from all BIN files as a batch, or otherwise automatically? Your “~300 minutes” caution is welcome, it’s not something I have been tracking.
Minne
The App for the SV 2450 tracks total air time , but only if you are connected when flying . If you fly with out having the official App running it is not included in the total displayed . Also if you use a different device to connect ie my phone instead of my tablet the total is only for connected device. Same applies if you have more then one SV , the app assumes they are the same and only totals the time . One way to do it with out app would be to record video for every flight and then add up run time of all saved videos .