Hello,
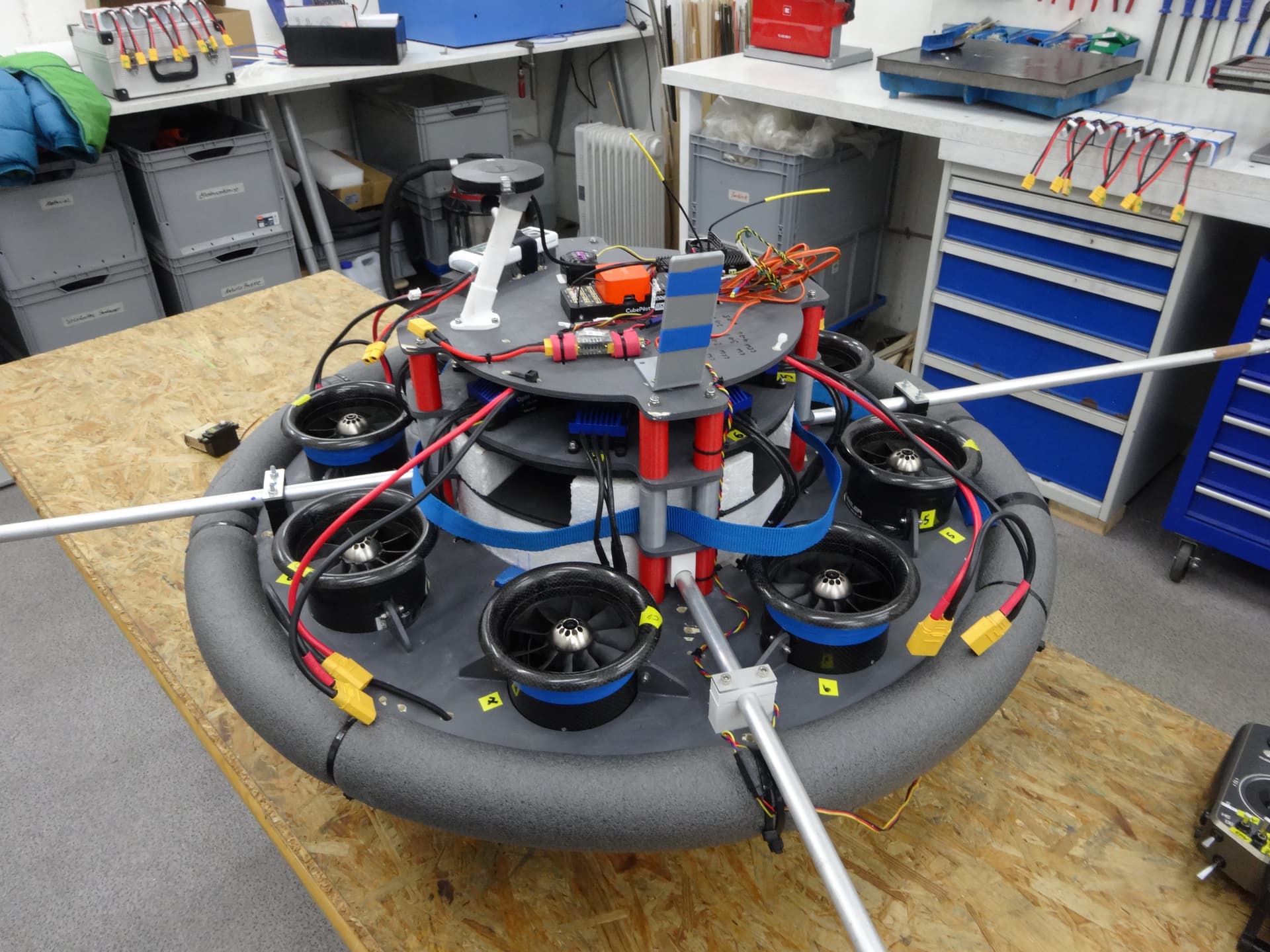
I just finished my project. It is a octocopter with 8 Impeller-fans. using orange cube pilot and Missionplanner. It flies and I can controll roll and pitch. But I have problem controling yaw axis. These impelllers spin very fast and have only very little torque. I Think this is the problem. And I do not have any Idea what parameters in Missionplanner I have to change. Does anyone here has experience with impellers in a multicopter and with the configuration of the parameters for the yaw axis? I would greatly appreciate your help.
I’m not sure if it’s really needed but along with the flight log, a photo of your aircraft may be helpful. Even if a photo won’t help solve the problem, I’d really like to see it. It sounds like an interesting aircraft.
Hello,
sorry that I did not reply for a while. I chrashed th copter and wanted to repair it before going on here. I thought help doesn’t help me if I dont have a flying copter. I also made a picture from my copter…let’s see If I can manage to show it here…there is no button for attachements
About 15KG and 40KG max Thrust. It allready fies in Sabalise and AltHold Mode but as I said I can not control the heading…and I am new on ardupilot. I only flew an very old DYI NAZA FC.
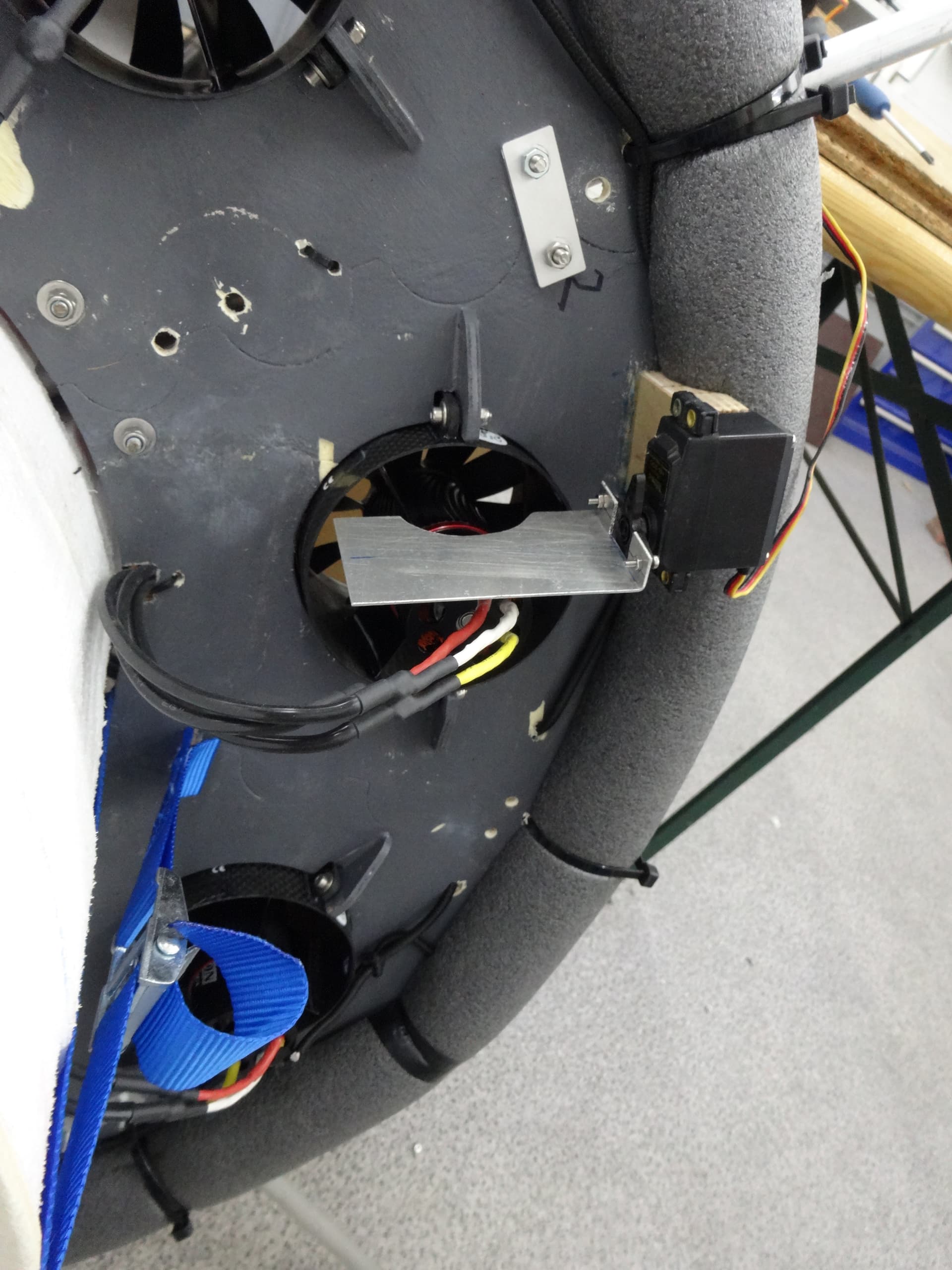
I think the impellers do not have enough torque (…I think, well…) What to do? As MindProbe said Thrust Vectoring could be a good Idea I already monted a little Servo under one off the impellers and it works if I controll it with RC…but how do I get the signal that contolls the heading hold in the Pixhawk to my Servo?
I guess you could just mount the EDFs at a slight angle, so the thrust helps with yaw control. Clockwise rotating EDFs should be rotated counterclockwise looking from the center of the craft at the EDF. Counterclockwise rotating EDFs should be angled clockwise. 3-5 degree should be enough.
The .bin log file is on the Flight Controller. You can download it using Mission Planner. The files are too large to attach here so place them on a file storage service (dropbox, Google drive, countless others) and put the link to it here.
Thrust vectoring isn’t supported in Copter with that frame type. Tricopter supports a motor tilt servo and bicopters support control surfaces.
Dave, I do not know what you will see in the log-file. Maybe you need this information:
I fixed the copter to 4 ropes to avoid crashes. So it hangs in the air while starting and landing
Hi Andreas-Yes, the log file is fine. Good job getting is posted
I think because it’s tethered though not much can be learned. When a multirotor is not in a free state many of the log metrics we usually look at are not that useful. Going forward current logging could be very useful if you can add it.