Yeah that’s where one problem lies, the test doesn’t work at times. I just tried it and had to set the throttle percentage to 15 and only one motor was spinning.
Perform a radio calibration (all Tx trims centered) and then an ESC calibration I suppose. Could you post the latest parameter file again? There is an odd entry in the file I extracted from you last log.
You must have done a radio calibration before posting this because the previous parameters files showed defaults for RCx max and mins.
Yes, I did do a radio and ESC calibration. Now things seem fine except the motor start spinning only above 15% throttle.
If there’s nothing else wrong with the params, I’ll go ahead with the flight test and perform the autotune. Will share the logs after.
If this happens during the motor test it has nothing to do with parameters. What ESC’s are they?
Tmotor Alpha 80A ESC
Try setting these parameters and test again with Motor Test.
MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
No difference. Still rotates only at 15%
Then perhaps you should make a new post because the title of this one is no longer relevant to that issue.
Agreed. I’ll keep you updated about the actual issue here.
Thank you
Hello,
I am conducting the flights right now, and there’s an issue with the PIDs I guess. It takes off pretty well in stabilize mode, but as soon as I change to althold, the behavior changes to as though the PIDs are reverted to the default values.
There EKF errors triggered as soon as I switch to Althold too.
Here is the LOG for the flight.
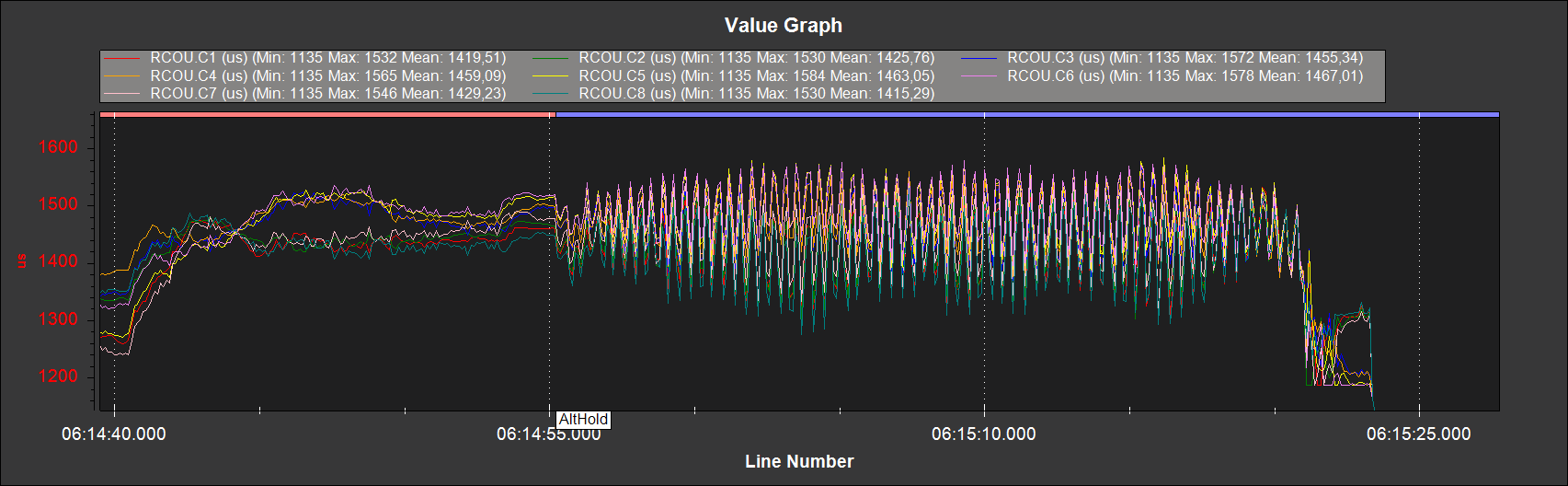
I took a quick look to your log and you are right, when you change to AltHold the pwm of the motors are noisy:
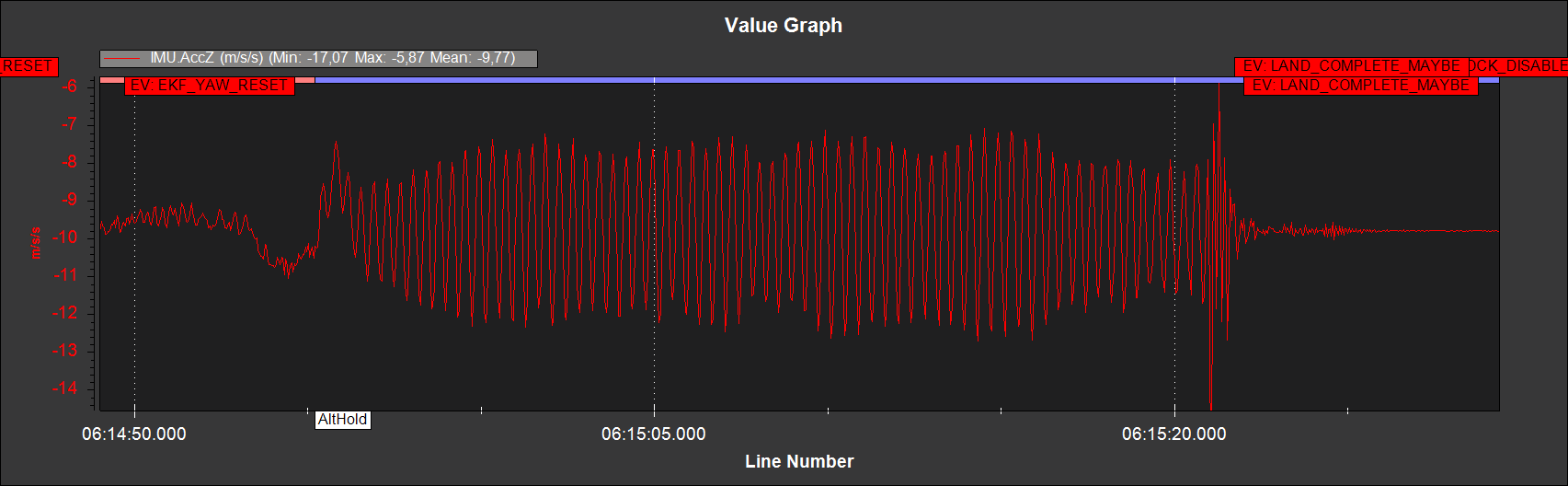
And the IMU.AccZ the same:
Maybe you can lower the altitude hold P variable (https://ardupilot.org/copter/docs/altholdmode.html#altholdmode), for me it seems that the drone tries to change the altitude very quickly and that leads to that strange behaviour.
I thought about reducing the AltHold P value, but I’m wondering why this began now, when no parameters were changed from the previous flight.
Here’s another log, this one was longer, and the behavior was slightly better. The motor issue persists.
I performed the flights. most of the other issues are corrected now.
I did an autotune and the new PIDs work fine.
However, the original issue persists, in PosHold or I’m guessing any guided mode the craft starts wobbling and it seems to compound with time.
I’ve used the notch filtering values as suggested.
There’s also an issue with the motor PWMs as the servo output for motor 3,4,5,6 are considerably higher than 1,2,7,8 in steady AltHold flight, without any stick inputs.
Here’s the LOG after the initial autotune.
And the LOG with the PosHold flight mode.
Bump
The problems persist in guided mode. There are oscillations in PosHold mode. There are EKF compass errors only during landing. I am unable to discern the exact problem, any help would be greatly appreciated.
Here’s another LOG with the mode change.
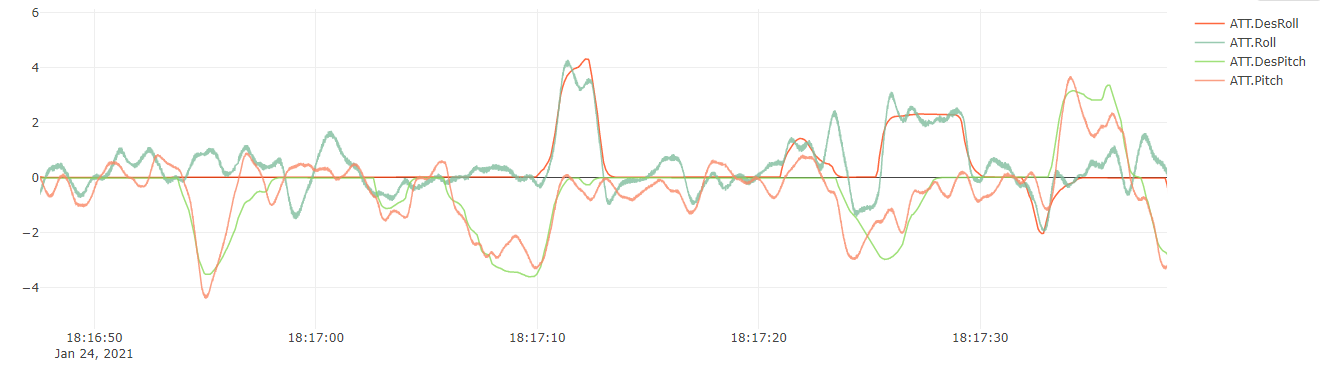
The tuning needs work:
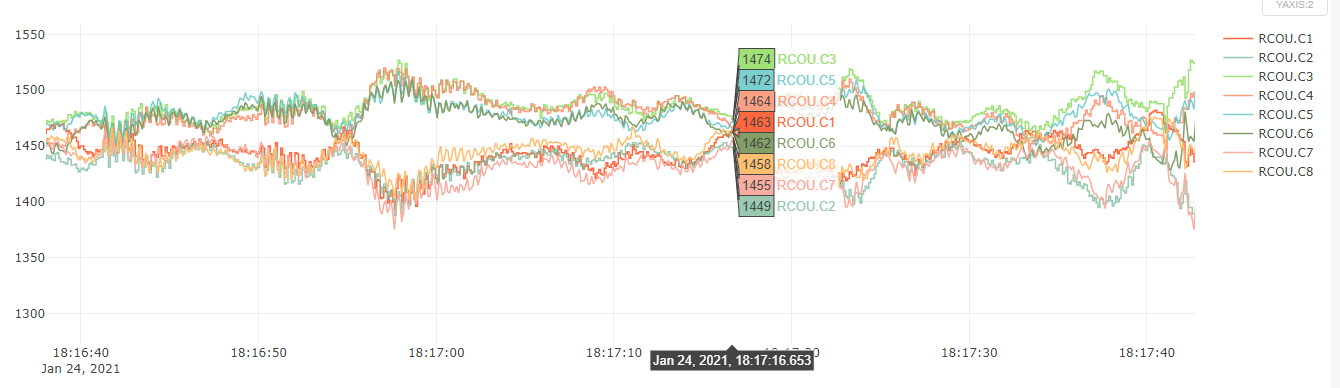
And there’s a motor mount twist problem. The CCW motors are fighting the CW motors to correct the physical yaw problem. This leaves less headroom for stability control.
There’s no battery voltage or current monitoring at all. These are very important and help with PID scaling as battery voltage changes, apart from safety, failsafe and keeping tabs on performance. These parameters wont be having any effect: MOT_BAT_VOLT_MAX, MOT_BAT_VOLT_MIN
Your MOT_SPIN_MIN,0.15 value is very close to the MOT_THST_HOVER,0.1725 value. You might want to check if you can reliably go lower on the MOT_SPIN_MIN, or add some dummy payload to increase MOT_THST_HOVER a bit.
Theoretically the stability and control should be about the same in all modes. Guided mode is not a good test to start with though, because it’s easy to input small sudden changes. Best to say with Stabilise, AltHold and Loiter until everything is well tuned. Minimise the roll and pitch stick inputs.
I would start with:
ATC_INPUT_TC,0.20 or a bit higher
ATC_RAT_RLL_P,0.1
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_D,0.003
ATC_RAT_PIT_P,0.1
ATC_RAT_PIT_I,0.1
ATC_RAT_PIT_D,0.003
And maybe increase these a little to start with:
ATC_ANG_RLL_P,4.0
ATC_ANG_PIT_P,4.0
Then follow the tuning guide and adjusting them to remove oscillations.
https://ardupilot.org/copter/docs/tuning-process-instructions.html