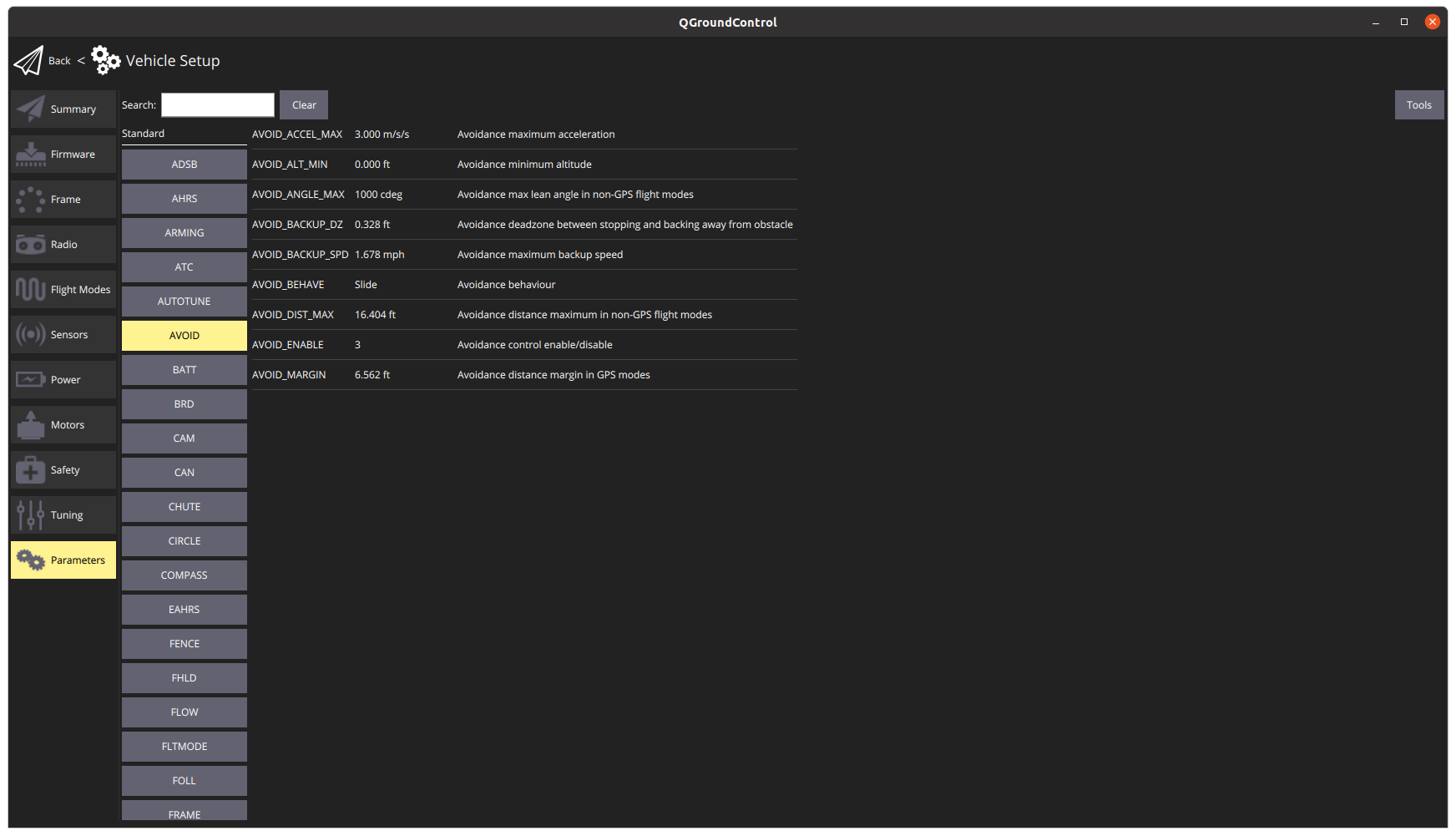
I am having lots of trouble with obstacle avoidance (OA). I’ve set all the parameters for both bendy ruler and djikstra as seen in screenshots:

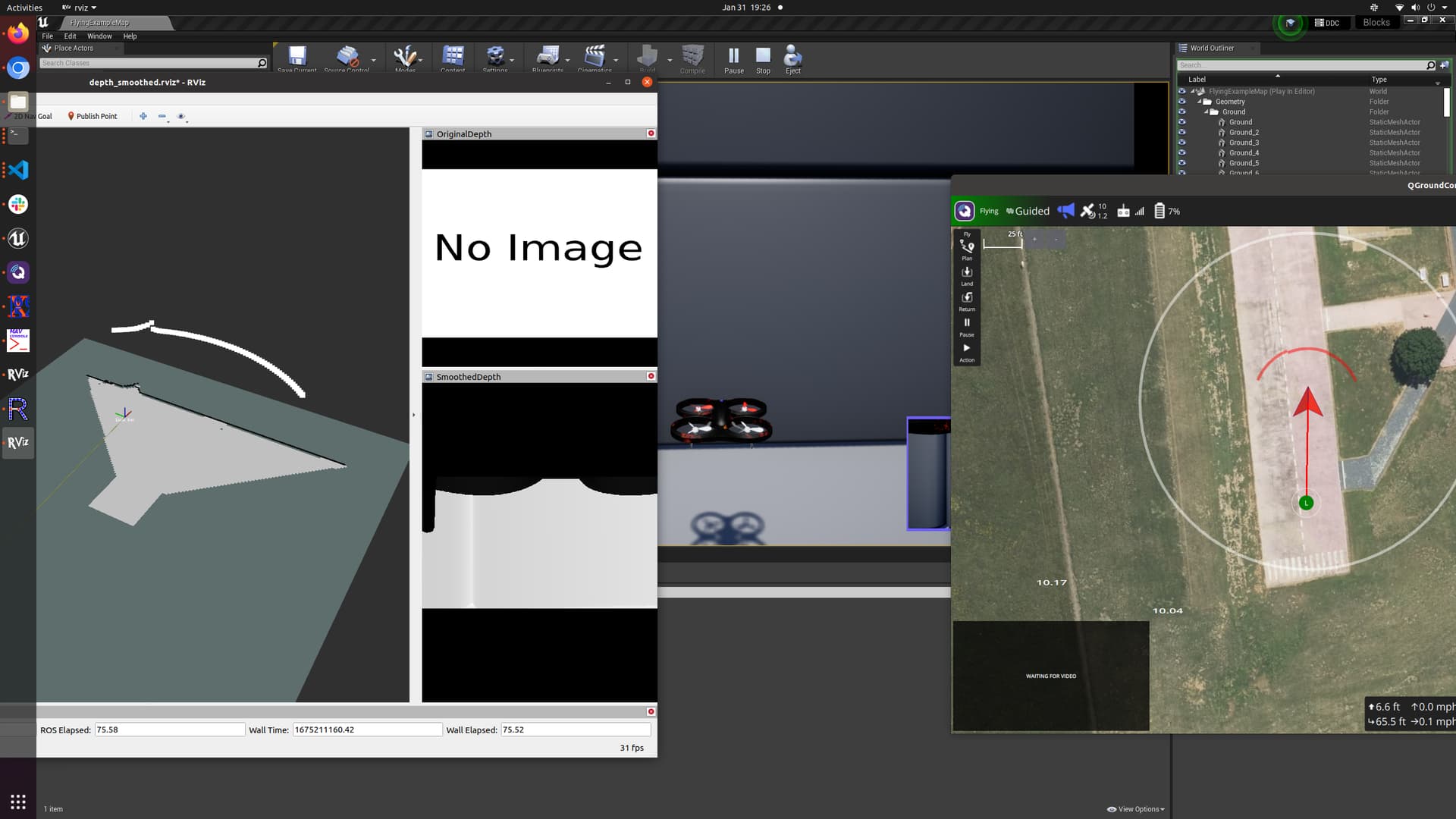
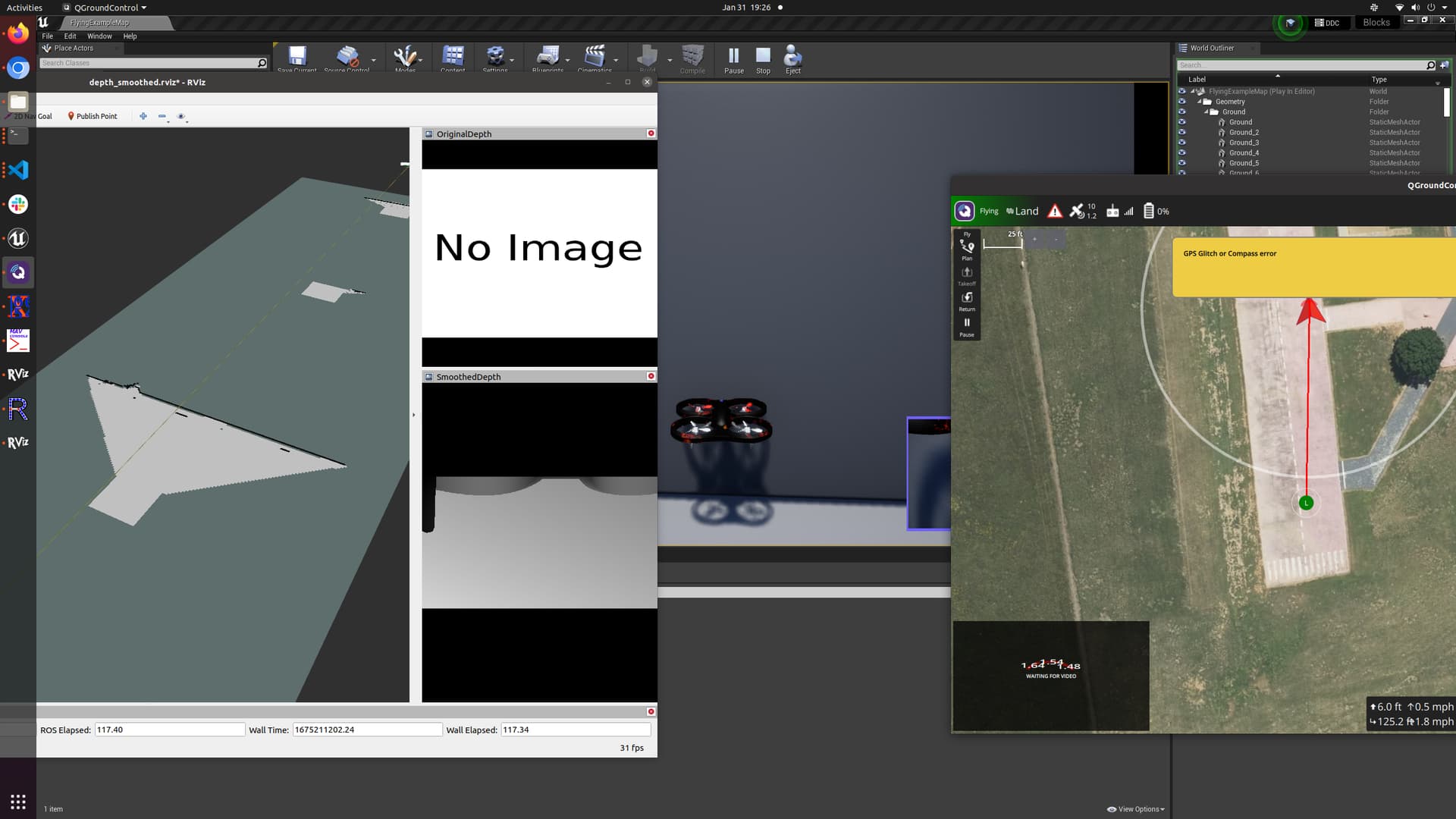
And I’m publishing depth image readings as laser scans following the example for Intel here. Yet when I send ArduPilot commands to go forward and crash into the block in AirSim blocks world, nothing stops it:
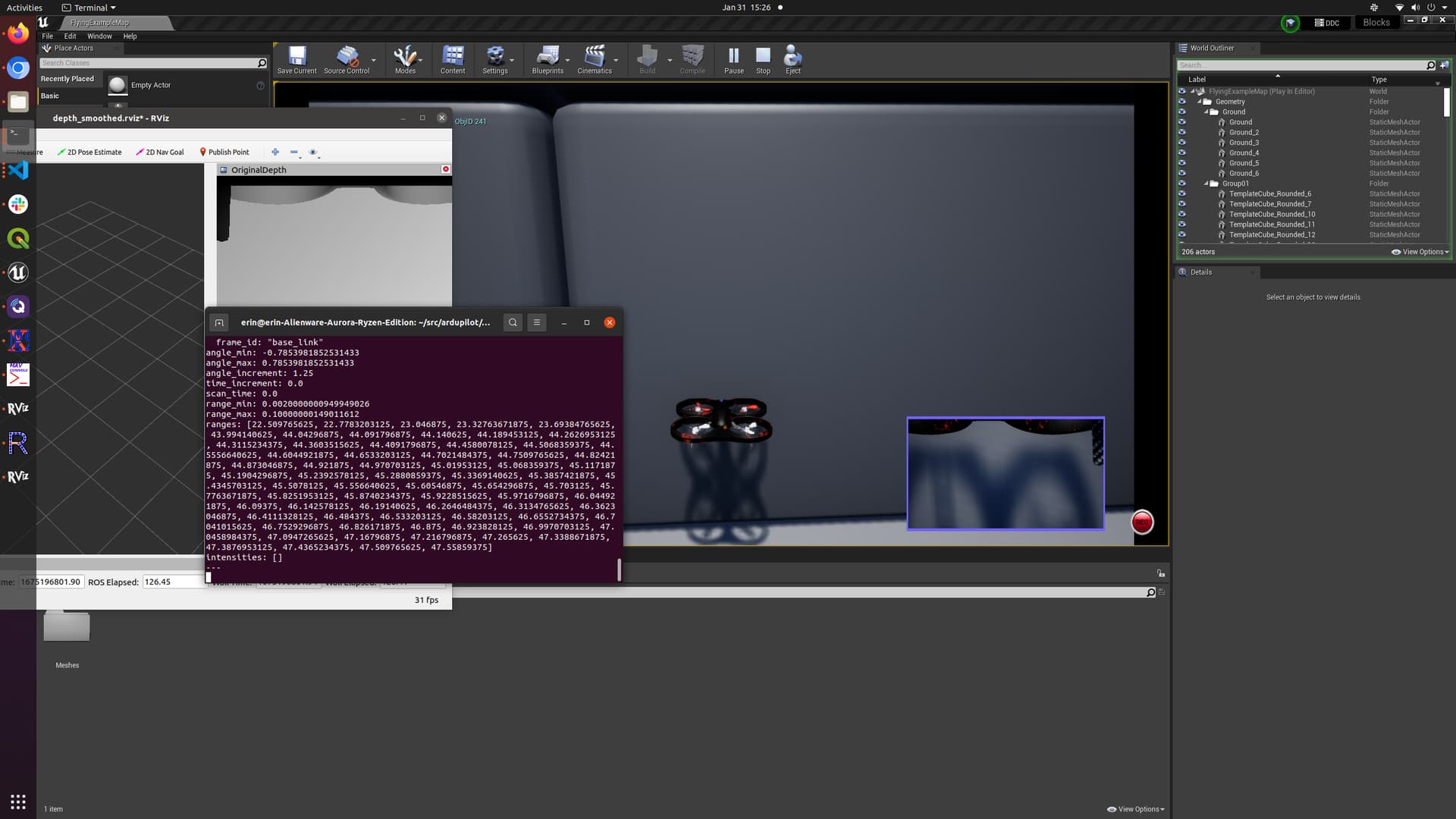
For a closer look, these are the last two obstacle distances messages being published to MAVROS on topic /mavros/obstacles/send:
header:
seq: 550
stamp:
secs: 1675196837
nsecs: 671053410
frame_id: "base_link"
angle_min: -0.7853981852531433
angle_max: 0.7853981852531433
angle_increment: 1.25
time_increment: 0.0
scan_time: 0.0
range_min: 0.0020000000949949026
range_max: 0.10000000149011612
ranges: [22.509765625, 22.7783203125, 23.046875, 23.32763671875, 23.69384765625, 40.4296875, 40.6494140625, 40.8447265625, 41.0400390625, 41.259765625, 41.455078125, 41.6748046875, 41.89453125, 42.1142578125, 42.3095703125, 42.529296875, 42.7734375, 42.9931640625, 43.212890625, 43.4326171875, 43.6767578125, 43.896484375, 44.140625, 44.384765625, 44.62890625, 44.873046875, 45.1171875, 45.361328125, 45.60546875, 45.8740234375, 46.142578125, 46.38671875, 46.6552734375, 46.923828125, 47.1923828125, 47.4609375, 47.75390625, 48.0224609375, 48.3154296875, 48.583984375, 48.876953125, 49.169921875, 49.462890625, 49.7802734375, 50.048828125, 50.390625, 50.68359375, 50.9765625, 51.318359375, 51.66015625, 51.953125, 52.294921875, 52.587890625, 52.9296875, 53.3203125, 53.662109375, 54.00390625, 54.296875, 54.6875, 55.126953125, 55.46875, 55.810546875, 56.25, 56.640625, 56.982421875, 57.421875, 57.8125, 58.251953125, 58.642578125, 59.08203125, 59.521484375, 59.9609375]
intensities: []
---
header:
seq: 551
stamp:
secs: 1675196837
nsecs: 782055616
frame_id: "base_link"
angle_min: -0.7853981852531433
angle_max: 0.7853981852531433
angle_increment: 1.25
time_increment: 0.0
scan_time: 0.0
range_min: 0.0020000000949949026
range_max: 0.10000000149011612
ranges: [22.509765625, 22.7783203125, 23.046875, 23.32763671875, 23.69384765625, 40.4296875, 40.6494140625, 40.8447265625, 41.0400390625, 41.259765625, 41.455078125, 41.6748046875, 41.89453125, 42.1142578125, 42.3095703125, 42.529296875, 42.7734375, 42.9931640625, 43.212890625, 43.4326171875, 43.6767578125, 43.896484375, 44.140625, 44.384765625, 44.62890625, 44.873046875, 45.1171875, 45.361328125, 45.60546875, 45.8740234375, 46.142578125, 46.38671875, 46.6552734375, 46.923828125, 47.1923828125, 47.4609375, 47.75390625, 48.0224609375, 48.3154296875, 48.583984375, 48.876953125, 49.169921875, 49.462890625, 49.7802734375, 50.048828125, 50.390625, 50.68359375, 50.9765625, 51.318359375, 51.66015625, 51.953125, 52.294921875, 52.587890625, 52.9296875, 53.3203125, 53.662109375, 54.00390625, 54.296875, 54.6875, 55.126953125, 55.46875, 55.810546875, 56.25, 56.640625, 57.03125, 57.421875, 57.8125, 58.251953125, 58.642578125, 59.08203125, 59.521484375, 59.9609375]
intensities: []
This is with ArduCopter version 4.3.0.