connection comes through ground station and is same connection that if i use mission planner to inject correction works without any probs.
Well, for what it’s worth, I’m getting reliable rtk locks for hours at a time using the ntrip module. My configuration is ntrip module running on Raspbery PI (onboard my rover). Pi connected to Pixhawk4 using the USB ports on the PI and the Pixhawk. Pi connected to the internet via a USB 4G LTE modem. I get occasional drop-outs, it seems they are more frequent under thicker trees. But even when I lose the RTK fix (i.e. GPS status changes back to 4 or 3), if I wait a few seconds, it comes back.
Are you using SSL for your ntrip server? If so, are you certain you have the most recent version of the ntrip module? It was only recently (jan-feb this year) fixed to work with SSL NTRIP servers.
I got a problem starting ntrip, the settings were:
HOLD> Loaded module ntrip
HOLD> ntrip set caster vngeonet.net
HOLD> ntrip set mountpoint VRS.105M3
HOLD> ntrip set port 2101
HOLD> ntrip set username kzchan11
HOLD> ntrip set password ***********
HOLD> ntrip start
HOLD> Start delayed pending position
I got a jetson TX2 connect to Pixhawk PX4 using the USB port on the TX2 and the Pixhawk. Then a CUAV RTK 9P GPS module connect to the TX2 using USB cable. then connect GPS module to Pixhawk using serial UART cable. I did take the rover with jetson, pixhawk and gps module outside.
The GPS module did output NMEA data to the TX2 (I check that using ~$sudo cat </dev/ttyACM1 in terminal, got a bunch of NMEA messages)
I couln’t get the ntrip module to start.
Anyone got an idea why? thank you.
It says “start delayed pending position”, it means it’ll not start sending corrections until a position is aquired. It needs it to be sent to the caster for a visrtual base to be created.
Mine works correctly but had to stop using it because it would crash after few minutes working. I than started using str2str and never had a problem since.
1 Like
I got the ntrip module started! It was my UART cable from gps module to the pixhawk was unplug somehow (???).
But ntrip status returning ntrip: no data
You could compile and use str2str from rtklib to connet to cors and see if corrections come trough.
1 Like
Did you use str2str as a ntrip client? Have you try it on a arm computer like Pi?
Yes i am using it as an ntrip client on a rasp pi4. Works good.
1 Like
oh thank you! We gonna give it a try.
Make sure you compile from latest branch, otherwise you will not have -b option used to pass actual position to cors to calculate vrs
–branch rtklib_2.4.3
I dont get it, what is that option? you mean we need to send NMEA messages back to cors station in case they require?
Yes -b option takes care of that. If you don’t send your position to the cors it doesn’t know where you are and where to create a vrs.
If you can wait until later i’ll post instructions on how to configure it. Can’t do it now because i am out of office.
Ok I can wait, thank you for that. Please make an instruction on how to configure raspberry pi to stream ntrip correction data to gps module
git clone https://github.com/tomojitakasu/RTKLIB.git --branch rtklib_2.4.3
cd RTKLIB/app/str2str/gcc
make
./str2str -in ntrip://USER:PASSWORD@CORS_IP:2101/MOUNT_POINT -b 1 -out serial://ttyAMA1:115200:8:n:1
I have my F9 connected to pixhawk trough serial one of the gps module and send corretion to the serial 2 of the gps module. Serial 2 of the module has NMEA and RTCM 3 enabled. Serial 2 of the module is connected to serial 2 of the raspberry (ttyAMA1).
I also made a service so that correction starts when raspberry starts and i can start, stop and look at the status of it. If you know how to make a service on raspberry it is really simple, just start the software as described above (./str2str -in ntrip…)
Hope it is clear enough, if you need more infos please ask.
sorry for the delay.
Corrado
Thank you so much. After one day of testing I finally get the RTK fixed.
Haven’t try the service thing though
One day??? What did you have problems with?
I got a problem with the wiring setup and the command. The wiring setup was not complicated but time consuming. In the command I didn’t type in the output stream at first so it didn’t work, and I’m kinda newbie in working with raspberry pi and linux
Anyway, thank you for the instructions
I just got a problem using the zed f9p gps module with jetson tx2. I connect the gps module uart port with usb port of the tx2 (by a usb to serial adapter PL2303 https://components101.com/modules/pl2303-usb-to-ttl-serial-converter-module)
When I check the data output from gps module, it supposes to output NMEA messages but all I got is this bunch of weird characters.
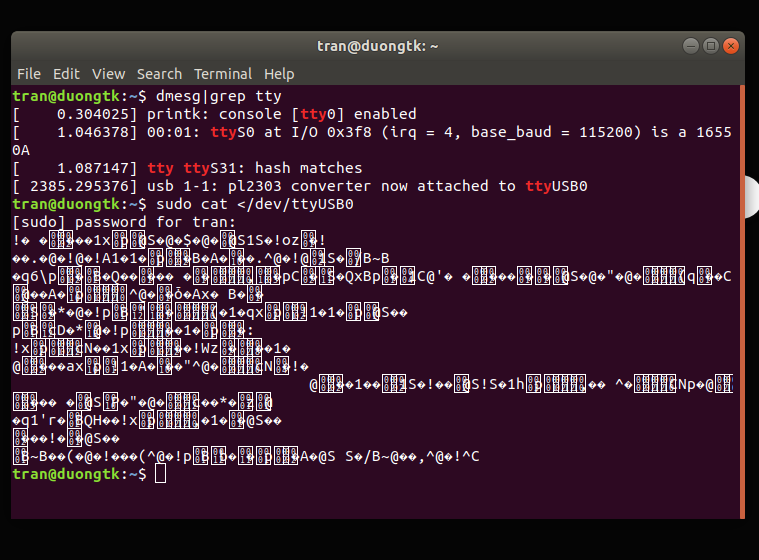
Because of that I couldn’t get the str2str works (I couldn’t connect to the CORS like I did with the raspberry pi zero (I connect gps module with raspberry pi zero by a usb type C cable cause it’s a cuav zed f9p gps module and it have a usb type C port https://store.cuav.net/index.php?id_product=101&rewrite=c-rtk-9p&controller=product)
Do you think it because of the uart connection? I used u-center to configure the uart port to output NMEA but the problem stay still.
Looks like uart speed is not set correctly. Make sure gps and jetson usb adapter run at same speed.
I don’t think so. I’ve already set the baud rate of the uart port on gps module and the usb port on the jetson tx2 to 115200