Hi,
These days I have been testing a heavy lifter multicopter, 37 kg AUW. I would like to share with you my concerns regarding what we saw after running several flight tests on the field, to see if you can help me with some tips that allow me to understand what is going on with the thrust, and how I can fix it. This is my setup:
- FRAME: Gryphon Dynamics 1400SP
- MOTORS: T-MOTOR U11II KV120
- ESC: T-MOTOR ALPHA 80
- PROPS: T-MOTOR 26” x 8.5 folding
- BATTERY: TATTU 12S 32.000 mAh
It is important to highlight two aspects of the flight tests that are crucial for the next discussion:
- Octocopter on a coaxial configuration (thrust penalization due to interference)
- Flight tests were done at 2800 m above sea level (thrust penalization due to lower air density)
Another thing to notice is that I had completed two successful AUTOTUNE procedure in serie:
- First, with 22 kg AUW (no payload)
- Second, with 32 kg AUW (10 kg payload)
My issue, in summary, is: I am not getting as much thrust as I would expect, according to the manufacturer motor data, when flying 37 kg AUW (15 kg payload).
WHAT I WOULD EXPECT
This is the manufacturer motor data for the motor-prop combination it is used in my setup, i.e, U11 + 26x8.5:
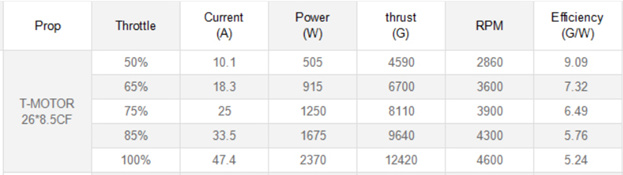
This is my reasoning (please, If any of you notice any mistake in this reasoning, please let me know):
- My setup should give, at sea level and in absence of interference (ideal conditions), 99.360 kg of total thrust.
- What is the % of thrust losses due to the combination of the two effects: coaxial configuration + high altitude? This is the BIG question here. Any of you know any kind of predictive method to estimate this figure before hand? I would assume a total losses due to both effects combined in 30%. Is this a reasonable assumption? In this case, with 30% losses, I would have a total thrust of 69.552 kg.
- Finally, let say that I would like to devote 70% of my total thrust for altitude control and the remaining 30% for attitude control. That means that my setup should be able to lift, safely, in the aforementioned scenario, up to 48.686 kg
WHAT I AM GETTING
First time I flew my setup with 37 kg AUW, it was obvious right away that the dron was getting trouble maintaining the altitude in both, ALTHOLD and LOITER flight modes. As soon as I lower the throttle stick a little, the dron tended to land, no matter if I applied 100% throttle (hopefully it was very close to the floor, so no damage to regret).
After reading about this issue, I concluded that the answer may be in the parameter which controls the throttle vs attitude priorisation, ATC_THR_MIX_MAN, which was set at his default value 0.5. I read here that somebody tried to lower this value (even going lower that the minimum value recommended, which was in fact 0.5), and it worked, so I set it at 0.35 and test it again.
This time it was better, we managed to lift very easily, at least apparently. We switch to ALTHOLD and LOITER several times. It is true that we noticed the drone this time a little bit shaky, in LOITER, but It may be explained due to the reduced attitude control priorisation. However, after 5 mins, I started to experiencing the same synthoms as in my previous flight: difficulties to maintain altitude and tendency to land. We decided to abort the mission at this point.
And one last thing, after both flights, the motors were cold, which I guess is because they were not working as much as one would assume, after noticing the problem with the altitude control.
Here I am sharing the logs from this last flight and some pics with comments:
CURRENT
150A average
VOLTAGE
Failsafe was set at 42 V (3.5 V per cells). As you can see, we stopped before reaching that point
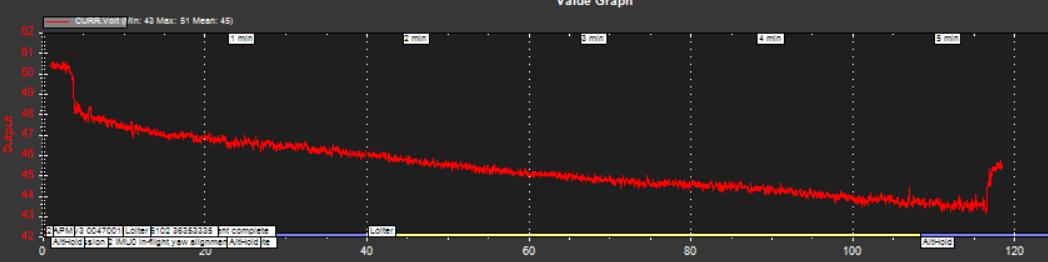
RC OUTPUT
As you can see, the eight motors are performing quite similar and the signal don’t look saturated
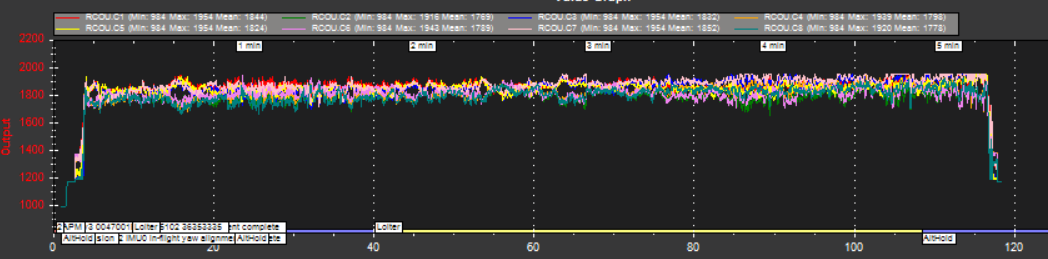
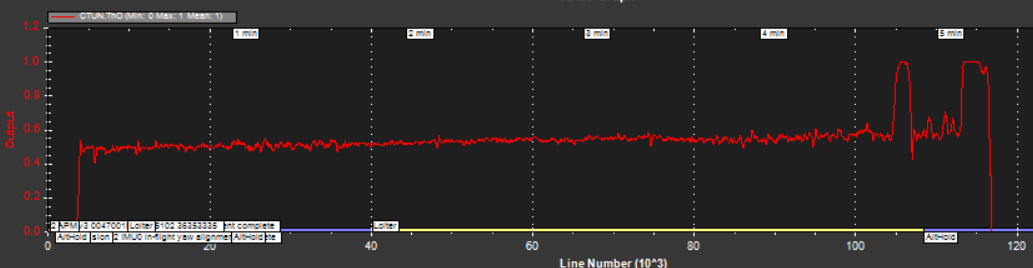
THROTTLE OUTPUT
Most of the flight the throttle output was almost 0.5.
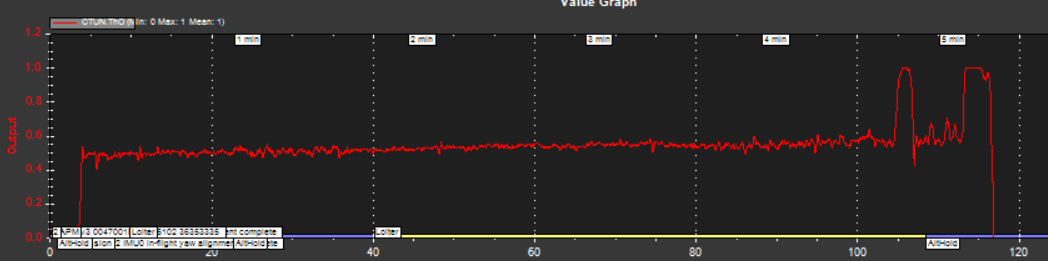
QUESTION
As you can see from the last picture, most the flight the throttle output was at 0.5, meaning that there was plenty of room for maneuver. Why then did it start to fail to maintain altitude properly after 5 mins?
Why is that happening? Any clue? Any recommendation?
Thanks in advance,
JM
