I’m doing a new build with a brand new ZealotH743 flight controller. I’m pretty sure I have done everything right, just like on the PixRacer, PixHawk and Durandal I have set up before, but I’m getting no servo outputs. I don’t just mean the servos aren’t working - I mean ZERO output to any of the servo outputs as shown on the Mission Planner Servo Output page. Here’s a picture:
Well I’m going to leave this here. It’s working now!
I don’t really know why, I just rebooted a couple more times and now it’s working. I am pretty sure I didn’t change anything after I set BRD_SAFETYENABLE = 0, and maybe that needed a reboot? I think I rebooted after setting that and it didn’t work, but then I rebooted a couple of more times and now it works, so maybe that was it?
I got the Zealot H743 direct from QioTek at www.qio-tek.com, but their website is down ATM. I contacted Jason and he says that they have been hacked and he is working hard to get the site back up.
I paid $231 for the “industrial edition”. Which included pretty much everything you need, including an ESP32 wifi module, compass and power module and a nice set of cables.
That price point is pretty attractive as well, especially considering the skyrocketing prices of competing autopilots. I’ll be curious to hear your thoughts once it’s airborne!
Yes I agree, if it lives up to what I’ve seen so far it could be very nice. It’s also a very nice size, actually sightly smaller than the Durandal (taller but not as wide). I’ll be posting some videos as I go.
I agree that UART is slowly going the way of the dodo in favor of CAN, and I’m endeavoring to make better (or even exclusive) use of CAN in my own projects.
But there are a lot of serial peripherals, and it’s attractive to have the ability to use them directly.
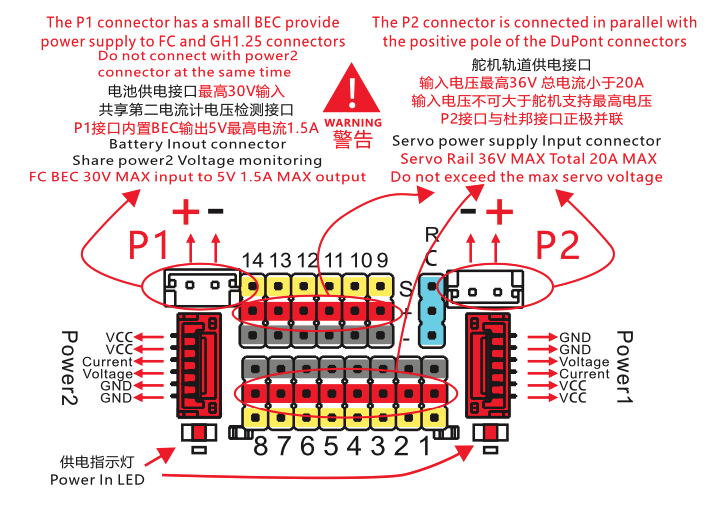
It comes with a power module - so what you have posted is just for the built in BEC. The FC has an interesting design were (if I understand it correctly) it has a built in BEC that can be powered by a separate battery from the main motor battery.
Up to 14S!
The specs for the Qio-Tek power module that comes with the FC are:
Item name: HV_PM power module Input voltage: 10-60V (3s~14s battery)
Voltage detection accuracy: + - 0.1v
Current detection accuracy: + - 0.2aA
Support higher power port output current: 5A
Maximum (detection) current: 60A