Hello guys, my name is Evans Mantas , I am currently studying Computer Science in the last year of my Bachelor Degree. I have already been engaged in a part of Ardupilot flight code,“professionally” through last semester’s internship, and doing simulations in my free time, trying to learn how to fly.
I would like to be part of the No-Fly / Stay-Out zones. Here is my suggestion , trying to be as more clear and at the same time, short on words:
The GCS gets the location of the nearest No-Fly zones (NFZ). In the settings menu the user defines the distance radius in which the GCS looks for NFZ). It sends the locations in the following array format :
[longitude, latitude, radius of NFZ in meters].
The autopilot on the drone checks the distance from the NFZ using the following formula:
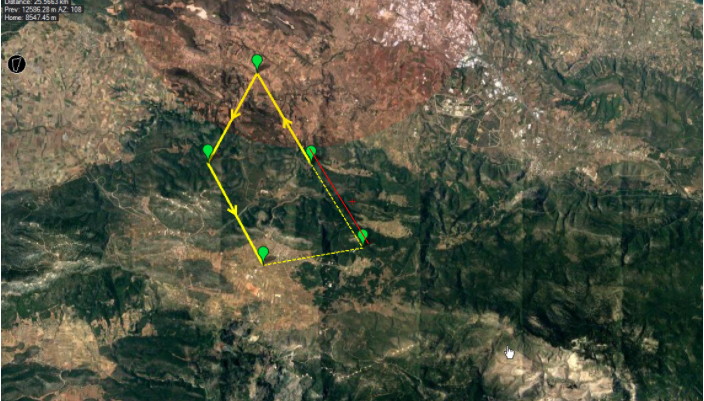
If this distance is equal of the radius of the NFZ, then RTL mode will be initiated.(Red line in the picture)
I am more than willing to hear your proposals and ideas to expand ardupilot functionality.Should there be any question or make a CV inquiry (I do not wish to make it shareable) don’t hesitate to contact me: emantas000[at]gmail[dot]com
I would like to be part of the No-Fly / Stay-Out zones. Here is my
suggestion , trying to be as more clear and at the same time, short on
words:
This is very much a requested feature. I don’t think you’d have any
problems finding open ArduPilot issues requesting this - you might mine
them for ideas.
We’ll expect a lot more detail on your GSoC application. Most notably
(IMO) - how are you planning on storing the zones on the AutoPilot?
If this distance is equal of the radius of the NFZ, then RTL mode will be
initiated.(Red line in the picture)
What happens if RTL would take your directly through another 2 or 3
no-fly-zones?
In Argentine a NO FLY ZONE near airports is a headhache for people that fly at legal rc clubs, many of them are near or in the same land than airports , DJI products are useless in that clubs.
This is a much requested feature so it would be great to have it added to ArduPilot. I think the final solution should act much like our avoidance and fence code, so the vehicle should attempt to stop at the edge of the no-fly zone but if the vehicle does manage to break through into the no-fly zone (i.e. they’re flying in a manual mode) then it should trigger RTL.
The key libraries that will involved in this project are AC_Avoidance and AC_Fence.
Looking forward to your proposal!
@cala2, don’t worry, any no-fly zone feature will be optional for the user.