It’s not a calibration issue, I re-calibrated and verified the PWM numbers, it’s all good.
The disarm command I was referring to is the one under Flight Data, Actions tab, look at the bottom right side of the green buttons and there is one called ARM/DISARM, that one works.
I can put the Q_M_SPIN_ARM to 0.0 but I feel that that’s a work around and since the aircraft is not disarmed there is a safety issue, plus I cannot use the kill switch on the aircraft to disarm it as only the GCS’s ARM/DISARM button will work.
Through my Futaba transmitter (T10CAG), I made a mixing function.
Switch E is a two position switch
Switch G is a three position switch
If Switch E is in the up position then Switch G is QLoiter, FBWA, RTL(plane then switches itself to QRTL as per the Q_RTL_MODE parameter)
If Switch E is in the down position then Switch G is QLand, QLand, QLand
So, in any event, with the aircraft flying or landed if I throw Switch E into the down position the aircraft will either land like a multirotor (which is the way I want it) OR if it is already on the ground and the damn thing wont disarm then the QLand mode will detect a zero throttle and/or a no decent rate and it should disarm.
Here is a possible alternate I’d like ya’lls opinion on:
Switch E is a two position switch
Switch G is a three position switch
If Switch E is in the up position then Switch G is QLoiter, FBWA, RTL(plane circles the Launch Point)
If Switch E is in the down position then Switch G is QRTL, QRTL, QRTL
In this configuration, if the aircraft is in flight then putting Switch E in the down position will cause the bird to stop what it’s doing, transition to forward flight, get close and then land as a multirotor. If the bird is on the ground and wont disarm then the QRTL will see that its altitude is below 10m (barring extreme barometer drift) then flow into a QLand mode which will detect a zero throttle and/or a no decent rate and it should disarm.
I did some more testing this morning, here is some data that might help others:
14minute 56second hover under these conditions:
wind <2mph
10aH 10C battery at 25.11V, weight of 2.65lbs
Charging the battery back up to 25.2V used 9654maH of charge
Starting hover current 33A, ending hover current @21V was 36.5A
No payload
Airframe weight is 7.51lbs without payload or battery
Hi: So i went in and changed the min and max Servo 9,10 to try and get it to be at 90 deg in Q_Stab both i changed to 2050 max and 980 min like Chad’s i saved params un plugged restarted then went and looked and nothing changed i can’t get the tilt to 90 deg in Q_stab nor can i get them to 180 or point forward when i switch to FBWA any suggestions would be very helpful, right now when i start up in Q_stab the tilt motors are at 110/115 deg and in FBWA they are at 155/160 deg.Thanks
Hi: so i think i solved my prob in the previous post by after changing Params i attached the battery saved the Params again then,disconnected the Batt then disconnected MP turned off Tx turned everything back on checked the param list and that worked Now my only prob before 1st Test flight is how do i change and limit the tilt servo’s move back from hitting the wing when moving the Tx control sticks any Help is appreciated Thanks
I tweaked the high and low endpoints via mission planner servo9 and 10 until the servos visually looked correct.
When you mounted the servos you should have screwed on the control horns so that there was excess travel past the 90deg (the up position) and the 0deg (straight forward position). When you can manually move the servo motors by hand to the 0 and 90 degree positions, then use your hand to move PAST (towards the wing) another 20 degrees.
When that is done, that’s when you tweak the min and max parameters so the motor is straight up and straight forward.
You then can adjust Q_TILT_YAW_ANGLE but just as was told to me, 13deg is perfect, but you can still tweak it if you wish.
A 13 inch prop will come to within an inch of smacking the wing at Q_TILT_YAW_ANGLE = 13deg. That’s a safe distance in case the props flex in flight (and they DO FLEX).
I was out of state on vacation last weekend. Great fun and so far we are having a nice Fall season!
As for the props spinning when armed, it is a personal choice. I have some VTOLs set to spin slowly and others set to not spin. It doesn’t really matter to me. I have found that my FrSky/Yaapu telemetry setup seems to be the best because all six flight modes are on one knob (same for Taranis and Horus) and I get an Amber audible through the MavLink messages for “Transition Complete”, “Landed”, “DisArmed”, etc.
Hi Greg: here’s hoping you enjoyed your Fall vacation.Does this Yaapu telem setup work on a Taranis X9D + SE Tx and if so do i need to set up a mav link radio and ground Station?I guess i’ll have to check this out,oh i’m almost ready to try out a Q_Stab and hover test my front props just cleared customs import ,today i’ve installed my 2 Cameras,put together a COG stand and if and when the wind quits i’ll put everything together and give it a test when all systems are a go
Yes, the Yaapu telemetry works on the Taranis X9D and other radios (see the Wiki link). You only need to physically set up the airplane side by running a cable between the Pixhawk Telem port and the FrSky S.PORT connection of the receiver. All other setup is basically changing a Telem port setting and then loading the firmware on your transmitter.
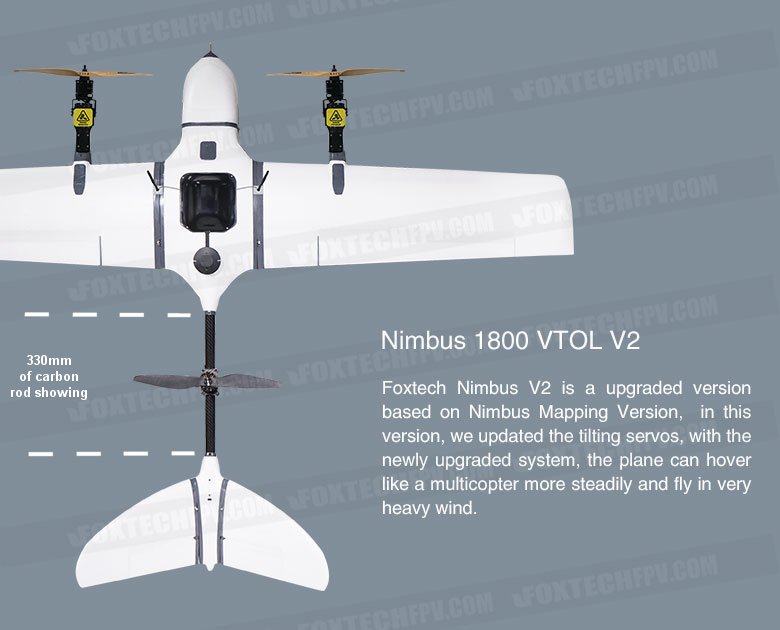
This conversation chain has been a great help for me in developing my Nimbus VTOL! Really good discussions…
I was flying my Nimbus recently and broke the tail boom sadly…
Can someone give me the exact length of the tail boom that I need ( between the mounting hole at the fuselage and the empennage)
I Switch E is a two position switch
Switch G is a three position switch
If Switch E is in the up position then Switch G is QLoiter, FBWA, RTL(plane circles the Launch Point)
If Switch E is in the down position then Switch G is QRTL, QRTL, QRTL
In this configuration, if the aircraft is in flight then putting Switch E in the down position will cause the bird to stop what it’s doing, transition to forward flight, get close and then land as a multirotor. If the bird is on the ground and wont disarm then the QRTL will see that its altitude is below 10m (barring extreme barometer drift) then flow into a QLand mode which will detect a zero throttle and/or a no decent rate and it should disarm.
This configuration is now my main one and works as described.
Hi Greg: well this morning i tried Q_Stab and every time it started to lift off it just starts Yawing to the right pretty fast,so sat it down and the torque ripped off the front landing legs and the bottom Camera, any suggestions would be helpful Please and Thank You. BK
My first suggestion is to not use a camera on your initial test flights. Use a dummy weight instead.
I would make sure that the compass is calibrated and verify that your directions (N, S, E, W) all show up properly in Mission Planner. Perhaps your Compass Rotation setting is incorrect for the installation.
Props are on in the correct position (motor numbers) AND that they are not put on upside down.
Re-calibrate your radio (transmitter itself if it can do so as well as through mission planner) and also check that the manual trims on your transmitter have not been bumped.
Look for anything ferrous on your bird, an iron source (even steel) will make your compass inaccurate. Magnets are a huge NO NO
Look for loose connections to your motors
Manually rotate your motors and listen for clicks that might be an unseated magnet within the bell of the motor
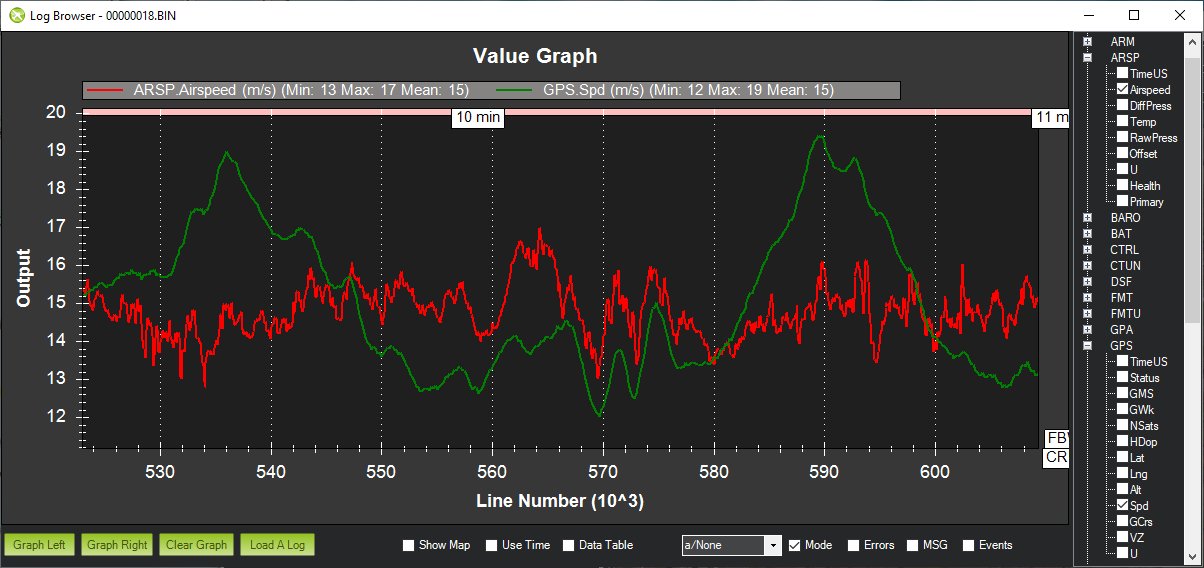
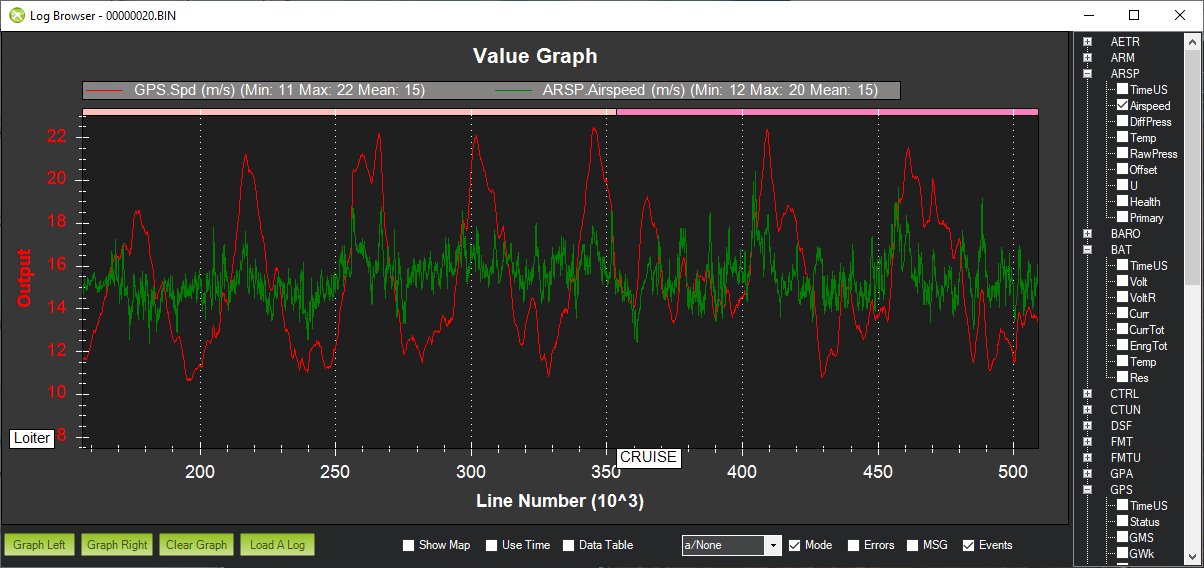
Maximum deviation between what GPS says and the SDP3x says is about 7 m/s (which is significant). I think you are correct Greg, in that it does need an initial calibration.
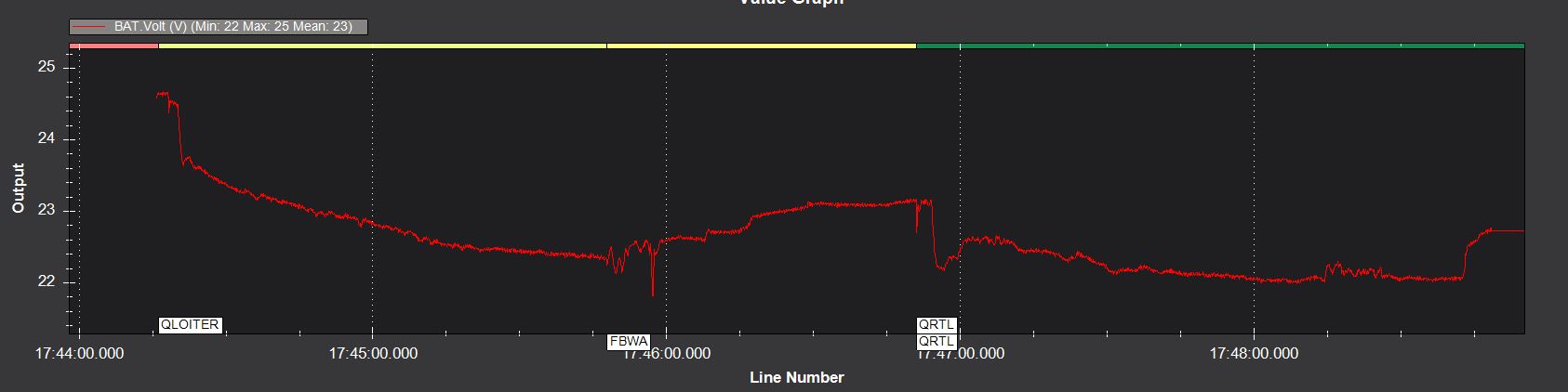
Battery Use, it was NOT a fresh battery (8amp, 10C, 6S):
The auto analysis likes everything but the compass, yet the bird did just fine:
Log File C:\Users\thear\AppData\Local\Temp\tmp8530.tmp.log
Size (kb) 117581.3662109375
No of lines 1128418
Duration 0:20:40
Vehicletype ArduPlane
Firmware Version V3.9.11
Firmware Hash a23329b2
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = FAIL - WARN: Large compass offset params (X:-43.85, Y:-135.90, Z:312.92)
WARN: Large compass offset in MAG data (X:-43.00, Y:-135.00, Z:312.00)
Large change in mag_field (57.37%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.27, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = NA -
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data
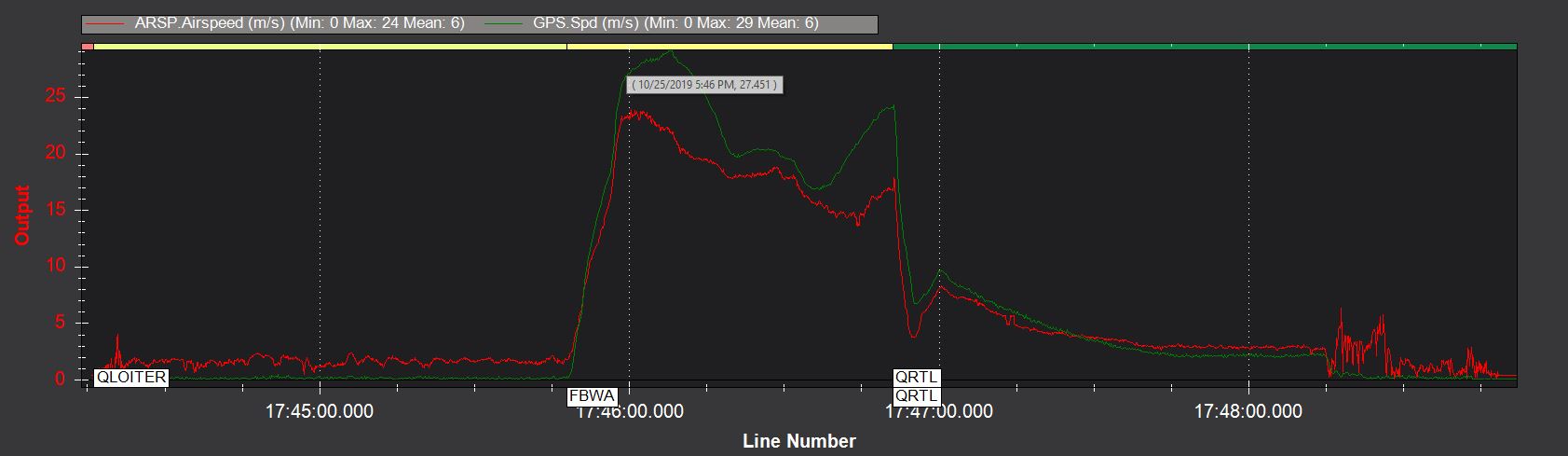
The magnetic disturbances seem to be related to VTOL mode, I’m not sure how to stop it.
Congratulations, Chad! The initial transition is always exciting. On your statement above, it is really GPS ground speed, not airspeed like the SDP3x sensor. So you will see a difference as the flight controller can now compensate for wind changes. Try flying in Loiter mode for a few minutes and graph that log. The effective airspeed of the plane is now steady as it includes the wind.
Hello. First of all I want to say thanks to all forum users and especially GregCovey. thanks to your efforts, and I started this project.
Like everything turns out, I already flew in quadrocopter mode, everything is not bad. but there is a problem that I can’t solve. If I configure that the control works as it should in quadrocopter mode, then in airplane mode the rudder works the other way around. I deflect the stick to the right, and the tail surfaces deviate to the left. I tried to invert both the signal from the radio and the tail servo, but then something else starts to be controlled incorrectly, for example, the elevator in airplane mode, or back and forth in quadrocopter mode. where do your tail wheels deviate in airplane mode if you pull the left stick to the left?