Hi Michael, did you notice what is the Nimbus speed during that moment? Logically if the plane speed (any plane) is let say 16 m/s and there is strong side wind (just example) 8 m/s which is 90 degree of the plane direction, then the resultant speed and Direction of the plane will shift significantly. This is just a simple math calculation. So in case there is strong side wind, we must adjust the speed and direction of the plane accordingly i order to achieve more accurate result. I have also this kind of problem (strong side wind) during take off and landing which is very bad.
Crabbing is normal in a crosswind, the aircraft does this to ensure that it follows the track. If it’s not following the track then there’s a problem.
Great inputs @Verloop.
we find it odd that the aircraft looses its trajectory on the given flight line towards the mission. We need to help the aircraft get back on the track by giving roll inputs. Im not familiar with Vtails characteristic.
yes its 16ms and climbing. I can understand the aircraft tends to crab. But for the aircraft to loose track of the flight line going to mission is odd. Looses track around 500mtr and we need to give rc inputs just to get it back. But durinh missions. I t is very solid with the flight line track
correct on this. i believe there is a problem with it not tracking the line going to mission. We have an A-tail but the rudder and elevator have seperate control surface. Unlike the Vtail nimbus it has mixing. I dont know if this the cause of the problem.
Aircraft climbs while heading to mission. wind coming from the leftside. Crabs left while climbing and drifts to left and looses track of the flight line going to mission.
I think in order for people to fully understand your problem, it would be better to post a logfile. That will definitely help to analyse your case.
Yes will upload logs once i have better data signal. Great help guys.
Yesterday my Nimbus executed its first mission 100% in Auto mode. It is a very short mission, with VTOL takeoff and landing, and only 2 minutes flying as plane. It was a too windy…

2 Likes
hi guys… long time not talk here… today i test my vtol nimbus using 16000 A 25C 6S battery in auto flight… two times i flight, at the first time the plane manage to transform become plane although it’s take a long time to transform it… it seems to be too heavy and not have enough speed to transform it… and for the second flight before take off i do preflight calibration, but it’s seems can’t transform at all… so i force it to land manually… do i have to increase the ARSPD_FBW_MIN or there is another setting for it??
PS: i will upload BIN and LOG after this
do i have to adjust TRIM_AIRSPD_CM and TRIM_THROTTLE?
I have the same problem but haven’t found a solution yet. The aircraft flies too slow (on the edge of a stall) after transition and doesn’t reach full speed until later. See my post here: VTOL fails to speed up after transition?
I changed ARSPD_FBW_MIN from 11m/s to 9m/s on the last flight and on the first 2 transitions it was fine but on the second 2 it again didn’t reach full speed until after the 2nd waypoint.
Not sure about changing TRIM_AIRSPD_CM is correct - some explanation here: https://diydrones.com/group/apmusergroup/forum/topics/trim-airspd-cm-and-trim-throttle-parameters
hmm… do u think i causing by airspeed sensors not calibrated or something? because at my first flight yesterday it manage to complete the transition but it take until after my second way point…
after it land, i try to calibrate the airspeed sensor but, it makes fail transition at my second flight…
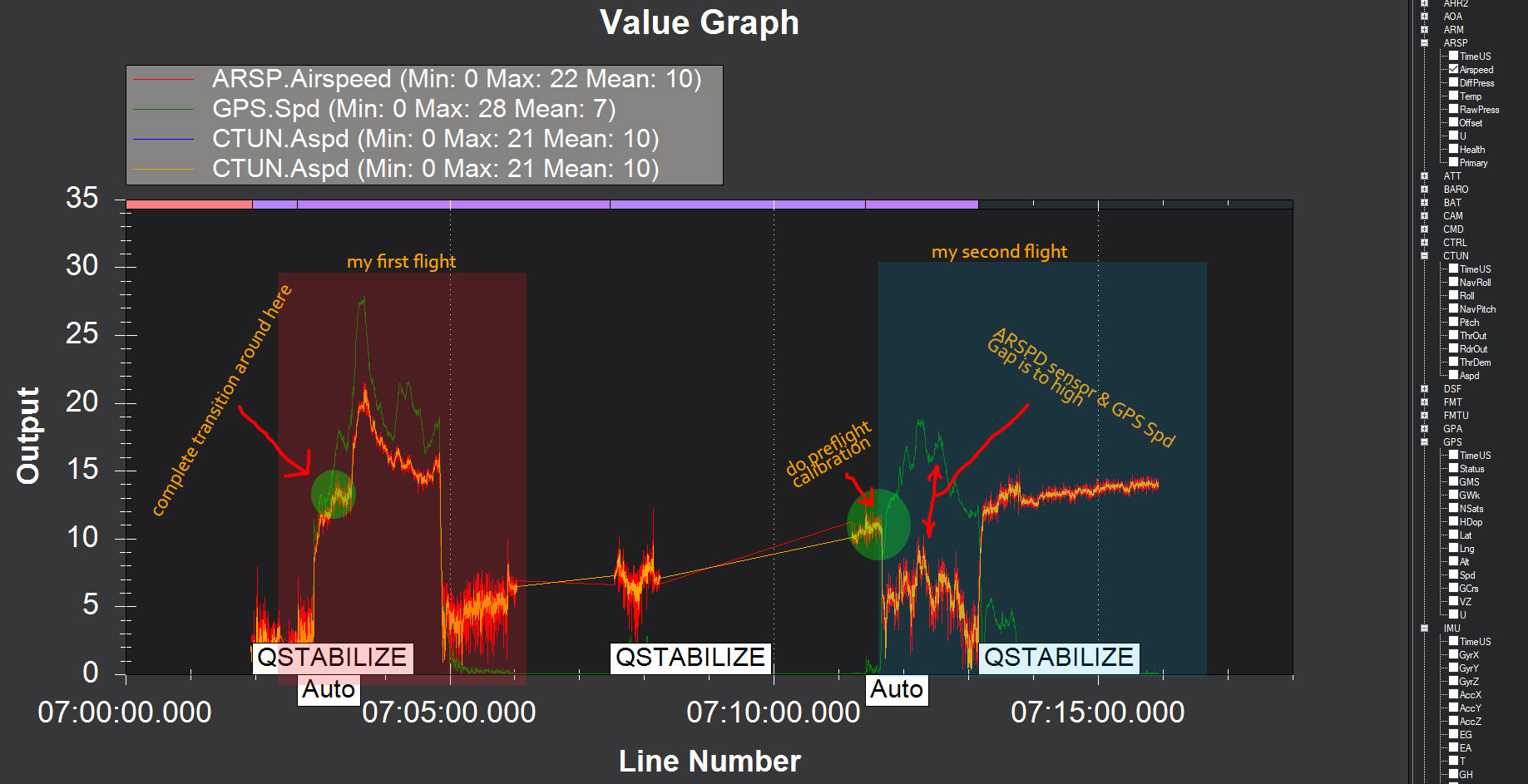
it’s seems GPS speed vs ARSPD sensor gap is very high after i do freflight calibration…
can we fix it by setting the ARSPD_RATIO for it?
Don’t think it’s the airspeed sensor calibration but it could be, the airspeed ratio should be automatically set with ARSPD_AUTOCAL during a loiter, so not sure what’s causing it. Seems the aircraft should reach a specified airspeed before the transition is considered complete and the motors go horizontal. It’s either not reaching this speed or not sensing that it is at that speed.
because it seems not sense the air speed right after i do preflight calibration, i do it to reduce higher airspeed sense during it still on the ground… but i think it become wrong after that…
after my first flight, the airspeed sensor read almost 9m/s during it still on the ground, after i do preflight calibration it become 2 or 3 m/s…
That’s normal, but I’m not sure that it’s the problem in this case as the airspeed sensor should get more accurate as the speed increases.
same with u, i think i will test it using ARSPD_FBW_MIN : 9…
I was testing my Nimbus out in the backyard in preparation for its maiden flight and everything worked except for the right tail servo. I pulled off the right v-tail section and the servo just kept spinning. I think that means the pot wiper broke so it keeps hunting.
Has anyone replaced a tail servo on the Nimbus yet?