Hello, I’m a complete newbie. and get my ranger 2400 just not in the air about 20 starts 0 succeeded. i always start with autostart with about 10% pitch but after about 2 meters climb the plane crashes immediately … the plane is held a bit nose-heavy (this has already been tested with more or less nose-heavy the result is always the same) all flaps were Of course, set beforehand that they are neutral on the aircraft and are symmetrical. i’m flying with a 3s 5200mah and holybro pixhawk 4 (this is built into the front of the tip) i have the following questions: does the installation location make a difference or is this not so dramatic? does it have to be stored with dampers? (the controller is very firmly attached to the battery with a cable tie) can someone look at my log to see if there is another error that goes wrong? what surprised me in the logs is the connection between ahr2 pitch and aetr elevator …
Elevator should be at 0 if pitch = 10, with higher pitch positive and with lower pitch negative. Unfortunately, this does not behave in the logs as I would expect. it would be really great if someone could help me here
I also tried to start the pid values standard and with values of a ranger 1600 because I unfortunately do not have the pid setting for a 2400. does someone maybe have the pid values of a 2400 for me?
have you flown the plane and trimmed it out in manual mode first? ardupilot isnt designed to fly a new plane without an experienced pilot. it needs to be manually flown, trimmed in manual mode then tuned before you can start setting up the auto modes. you cant build a new plane and try and get it to do an auto mission first time out.
@geofrancis i dont have flown the plane in manual mode (some told me its easier to start a new plane with auto launch than autotune) On Saturday i will try a start in manual mode and trimming the plane first)
Trimming:
Trimming 1 elevator 2 aileron 3 rudder
is it better to change the trimm values to ardupilot config . or is it better to adjust the length of the servoarms?
either works, but it has to be able to fly stable on its own before adding the autopilot or you just end up adding problems on top of problems.
the key is to go through the modes adding more and more automation so you can check off parts as you go.
once you have it stable in MANUAL mode, verifying all your control surfaces and that its trimed level then try ACRO, that should stabilise the plane using just the gyros.
if acro works ok and the plane is not shaking then try STABILISED, that will add auto level to the gyros.
if the plane flies ok and doesnt try and dive into the ground or go inverted then you can try FBWA, that is now a fly by wire mode with manual throttle. it will fleel sluggish in this mode until its tuned but it should be controllable.
if that goes well then try FBWB, that is fly by wire but with auto throttle. if that works ok then you can try LOITER and RTL. since they are just GPS guided version of FBWB. but be ready to take control back as gps or compass errors can send it off never to be seen again if your not quick to take back control.
assuming all that works then you can do AUTOTUNE to dial in the gains to make the handling much sharper.
if you have any problems with any mode just switch back to the previously verified mode to regain control.
once all that works and you have tested it a few times then you can think about AUTO mode
@geofrancis Thank you very very much for taking the trouble to help me with my problem. After setting the trim, I start with
ACRO here it should be ensured that the aircraft wobbles
STABILIZED to see if axes are swapped
FBWA
FBWB
LOITER check for gps functionality
RTL check for homeposition functionality
about the acro mode I would have the following question should a wobble occur what is the main reason for this and how can it be set?
what exactly should be set or tuned at FBWA?
I still have a question about the attachment of the fc, does it make more sense to attach it in the middle of the GC area or does this make no real difference? and is it advisable to fix it on buffers? (I could easily print this with flexible resin)
I am really sorry that I am unfortunately asking questions that are self-evident for you
ACRO should just behave like manual mode but a little smoother, if it does anything strange like trying to shake the plane go back to manual mode. if it does it only at high speeds then you have too much servo gain, if its constant then you have a configuration problem.
FBWA is the autopilot in full control other than the throttle and your just steering the autopilot, you should be able to zero the throttle and glide, if it starts to stall you need to adjust the STAB_PITCH_DOWN by a couple of degrees so it trims the nose down a little at low throttle.
FBWB is FBWA with auto throttle, this is where your throttle settings come in, for smaller planes you want to tweak the slew rate of the throttle if you think it doesnt respond fast enough.
the flight controller should be in the CG of the aircraft for ideal setup but its pretty tolerant on planes. generally on a plane its made of foam and the motors are a good distance away so vibration isnt too much of a problem but it depends on your setup.
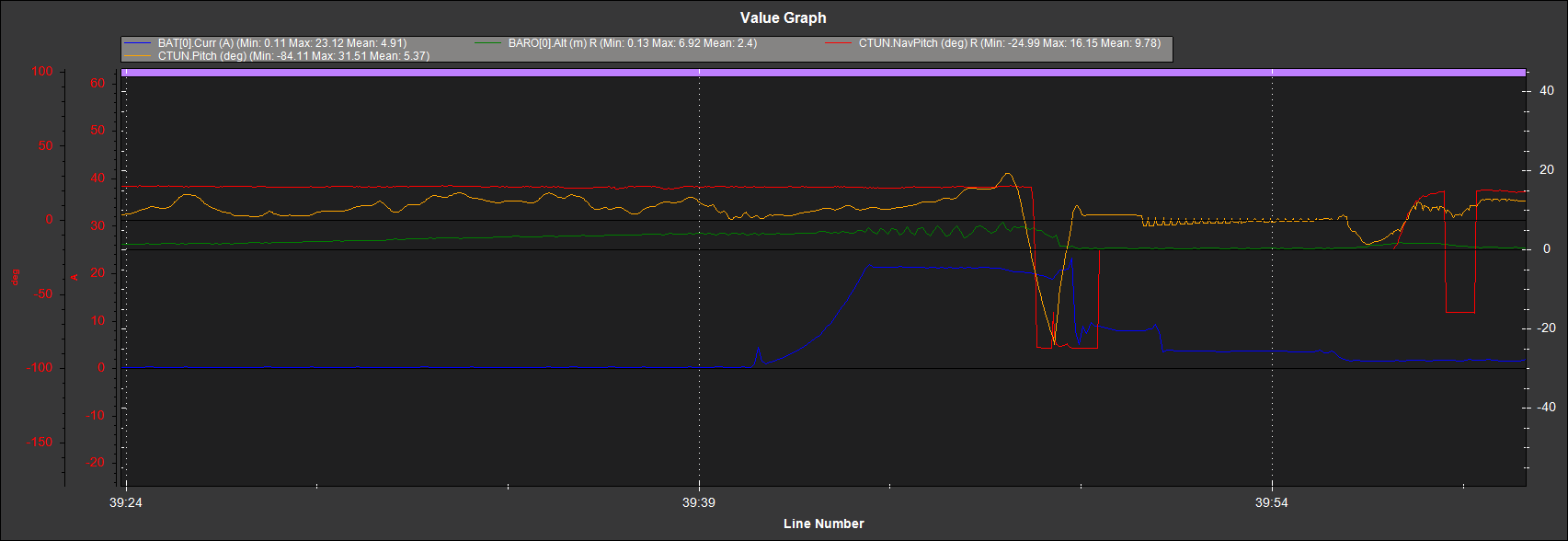
I took a quick look at the log. The barometer line looks funny. It starts oscillating when power is applied. The reason I was looking at it was to see when you’re flying. The battery current shows throttle is blipped a few times, but it appears to come on in earnest at 39:39 and ramps up to 20 Amps over 3 or 4 seconds…staying at that level for 7 or 8 seconds.
At the start, CTUN Nav Pitch (desired pitch) is at ~16 degrees (perhaps too steep). You indicate that it should be trying to hit 10 degrees (probably about right). Once actual pitch (CTUN.Pitch) hits the 20 degrees, the plane noses down. I suspect a stall. You were very slow at that point, too slow to fly and climb at 20 degrees. Demanded pitch also drops a tiny bit later which seems odd. But it probably would have crashed regardless (being angled down 30 degrees 1 meter or less from the ground).
I looked at the picture for the Ranger 2400. It shows gear…but I don’t see a takeoff roll in the alt and speed data. Did you throw the plane or try to do a rise off ground takeoff?
Check the orientation parameters for setting orientation of both flight controller and gps/compass module .
These must be set the way your installation is put together.
If the arrow on flight controller faces right 90 degrees then the parameter would be set to YAW=90
 for taking the trouble to help me with my problem. After setting the trim, I start with
for taking the trouble to help me with my problem. After setting the trim, I start with