I realize these are older posts, but in case you still need an answer, yes the mini Pix now uses ChibiOS. You can find the latest ArduPilot builds for the RadioLink mini Pix below.
It looks like you loaded an incorrect bootloader so from one of the directories below, use the .hex file in the directory with “with_bl” in the name. bl stands for bootloader.
The reason that you see many number is that you are looking at the firmware file on your browser instead of downloading it locally. What you really want to do is to download the “arduplane_with_bl.hex” file to your local PC by right mouse clicking on the link and then selecting “Save link as…”. This will transfer the .hex file to your PC so you can load it into the mini Pix using Mission Planner or another application.
Thank you so mucho for your answer
I have 2 bricked Mini Pix, one i recover one of them thanks to your instruccions, but the otherone cant be recognized by manager devices when i connect usb cable. For that reason i cant select any port in mission planner for radiolink, and i cant install new firmware.
This flight controller haves fixed green light shining.
Do you have any solution ??
It sounds like your other mini Pix is stuck in DFU bootloader mode. I would download the BetaFlight App for Google Chrome browser and refer to this information below. Follow the directions for installing Zadig and swapping the one Windows10 driver. This allows you to talk to the STM32 BOOTLOADER as a “DFU” device in BFC, not a regular Comm port. I’m sure your board is fine, you just need to install the bootloader and firmware.
fwiw, as minipix doesn’t have any convenient DFU pad, pins or button exposed, you need to pull the STM32F405’s pin 94 (boot0) high (3.3V) to enter DFU mode. there’s a tiny resistor nearby that can be used to apply 3.3V without too much hassle:
I am also having some issues with my MiniPix as well as 2 Omnibus f4 nano V. 6 boards. I am able to configure them once, and as far as the MiniPix I is flying well in a twin motor 4 channel plane. But after this success, I am no longer able to connect to mission Planner, and it no longer sees the boards to re-load the firmware without using Impulse RC driver fixer. Then all seems well until next time.
So I tried another computer with the Omnibus f4 Nano which seemed to work after reboot, I was even able to get all 4 channels except throttle would only work if I changed Throttle to RC3 on the servo tab. But after a little success, the rudder stopped working and I am left thinking this is pretty flaky to fly nice planes. The Nanos work perfectly on INav, but I really wanted to use them in small 4 channel explorer planes and well INav has no channel remapping.
Next step is a Matek 405 wing.
A little of help please? I flashed via MP2 in Ubuntu the Rorver 3.5rc1 in (format BIN I think)
The board entered in a state of green light and it has a flash red when boot for few seconds. While is flashing in red, the computers can recognice it as PX4 FCU.(I dont know if is ther original bootloader or was flashed via MP2)
The thinG is Im trying flash the xxxxxwithbl.hex via BTC (chrome) but dont give me a port to choose in windows, and in linux doesnt work
Do I need force the DFU mode as above with the 3.3v in the pad?To do it I first need connect via usb,force the dfu and flash with BTC,that is OK?
@Andres_Camacho the MiniPix does come with an ardupilot compatible bootloader, a radiolink proprietary one though. while it‘s not the default unbranded ardupilot bootloader that‘s included in the arduvehicle_with_bl.hex files, it‘s not generally required to replace it for firmware handling. you can well use MP to flash ardupilot firmware files only based on the existent radiolink bootloader.
replacing the bootloader however requires booting the board to DFU mode. this board does not have a boot0-jumper or -button easily accesible, so it requires shorting the boot pads as shown here: http://ardupilot.org/copter/docs/common-radiolink-minipix.html
Thank you, after all day briked I got make it work and I guess installed with chibios as I flashed the ardurover 3.5 via apj file from the servers for minipix. I couldnt get put the board in dfu and flash the hex files.
Even with you explanation I dont understand what happened or even if I have the right bootloader in my or board.
The apj file flash the bootloader too, or only the firmware.
How I can check if my BL is the right, because all time was PX4 FMU V2. How I can to know if chibios is installed. Can I use now the regular Missionplaner as I have rover 3.5?
Im worry I have the full pixhawk bootloader installed
don‘t worry too much about that bootloader. the default one will work just fine. if you‘ve got regular (non-branded) MP and non-branded adupilot firmware working alright, i personally wouldn‘t bother to replace the existent bootloader.
Why would anyone use that FC? It has all the disadvantages of FC’s with that form factor (annoying 360° I/O) and none of the advantages of small cheap FC’s (Vbatt power, OSD, current measurement, BEC’s, general AIO features). Looks like old recycled stuff to me.
I only signalled, maybe someone is interested.
Anyway Vbatt power, current measurement, BEC are in the included power module. To have a separated power module has its advantages, on some cheap AIO boards the integrated BEC is a source of noise for the rest of the board.
That said it remain to see the quality level of the PCB, components, soldering, …
In my opinion power features better in other board, due to noise or any mistake in wiring. The 360° is no bad or good, but is good the size against the full size PX4. For rover with differents levels, vertical inputs can be a problem,force you to have the the pix4 in the top level.
The conectors are more standars than the minipix I think. It can be upgrades with other gyro, I would like use chibios, im not sure, but probably.
I think just is needed check for the assembly quality. I can be nice for rover, sub or antena tracker, or to work with a small companion.
as for my type of application boards without OSD features lost value noticeably since we have ardupilot onboard OSD, i decided to try and add that to the mini-pix boards i still had in my drawer.
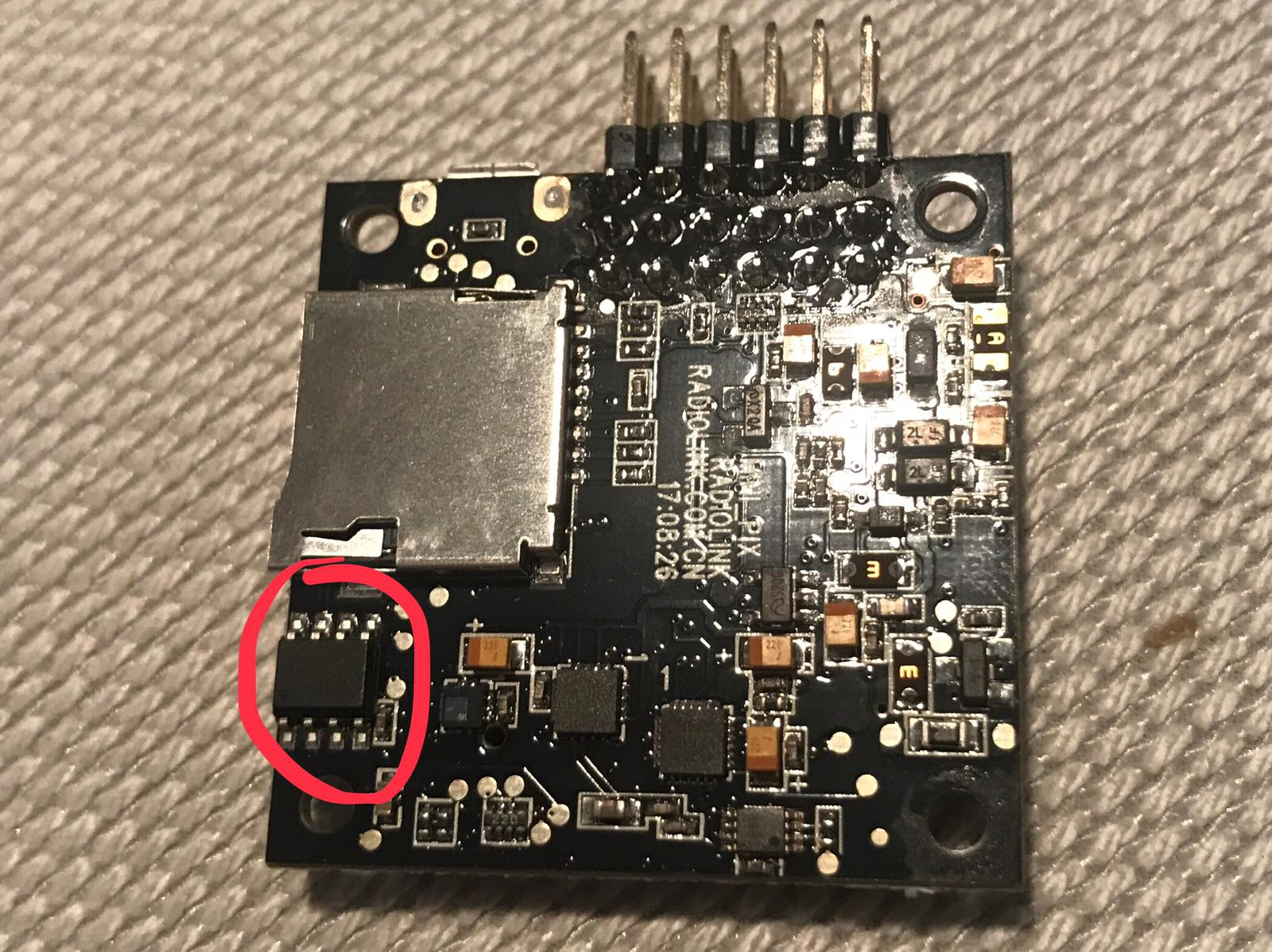
mini-pix does not have SPI pinned out, but it uses FRAM on SPI2. that is a nice to have feature, but not really essential, so i tried and use the SPI2 pads of that additional FRAM chip to connect an airbot microOSD board modified for use on external SPI with onboard OSD as described here: ArduPilot onboard OSD using an external SPI OSD breakout board
i located the mini-pix’s FRAM chip and desoldered it:
from the chip’s datasheet i got the pin assignments:
then i made the necessary adjustments to the firmware. removing FRAM requires some storage layout rearrangements, including the bootloader storage defines. it’s now using MCU flash only, just like other boards that have no additional onboard memory. beyond that, adjustments to main hwdef include replacing the FRAM with the OSD in the SPI device table, adding the required font file includes and trying to not brick anything
the respective changes can be found here:
Hi, does anyone know if its possible to set any of the Main Out pins to relay on the Mini Pix since there are no AUXOUT pins? I have the latest arducopter firmware for mini-pix.