YAW 270 degree showed because CUAV X7 pro internal Magnetometer Kept 270 degree offset with original IMU.
Dont get it? Its mounted in the forward direction?
The default RM3100 magnetometer mounted in 270 degree in flight controller…that means if FC mounted forward the compass direction is 270degree.
Its not problem if you get current drone heading matching with map its working normally.
Aha, ok thanks.
However, that doesnt explain the issue with arming in Loiter mode, and “GPS2 YAW NOT AVAILABLE”?
Ek3_SRC1_YAW what you have set?
Yes. It´s set to 2, only using GPS
This may due to incorrect setup of GPS_POS1 X,Y,Z and GPS2_POS2 X,Y,Z value.
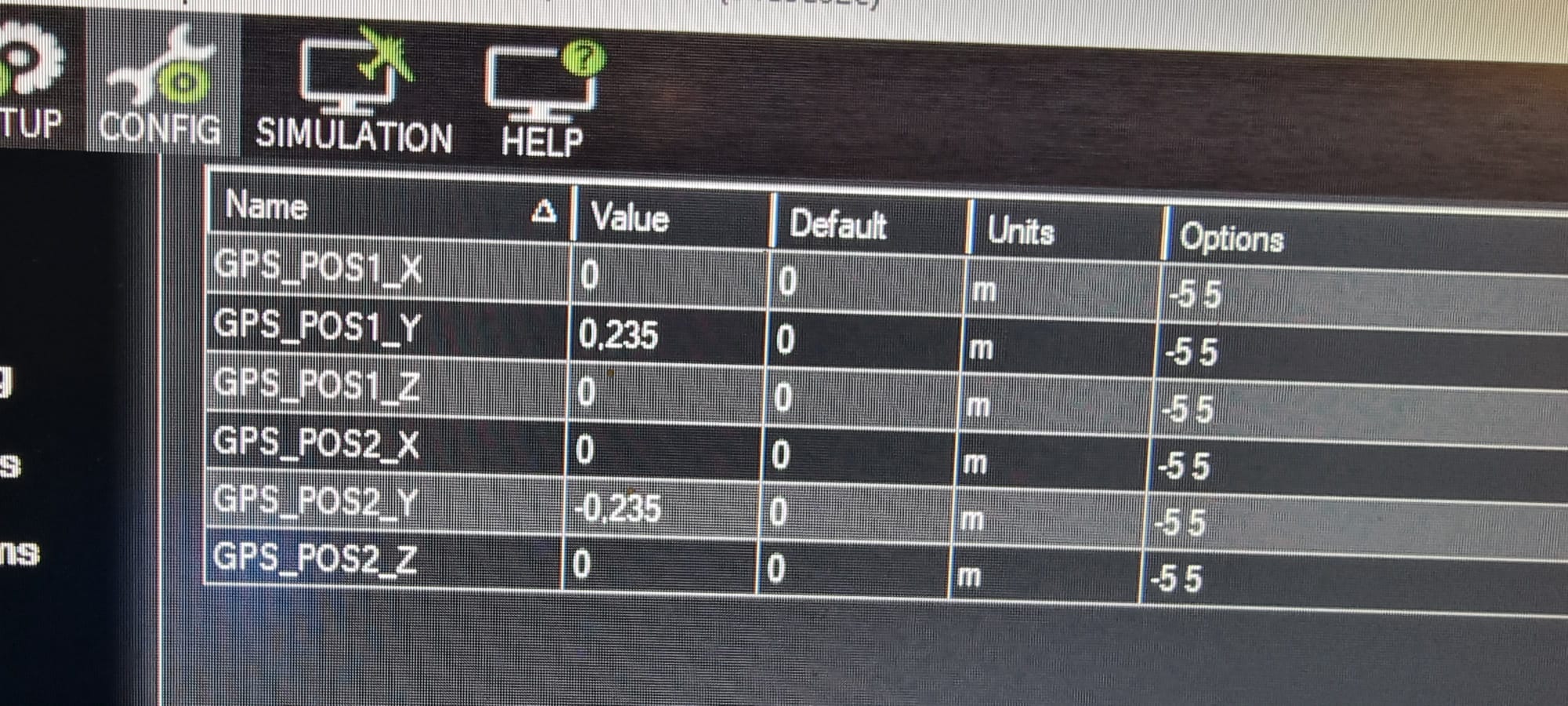
I actually forgot to measure this after changing GPS stand…
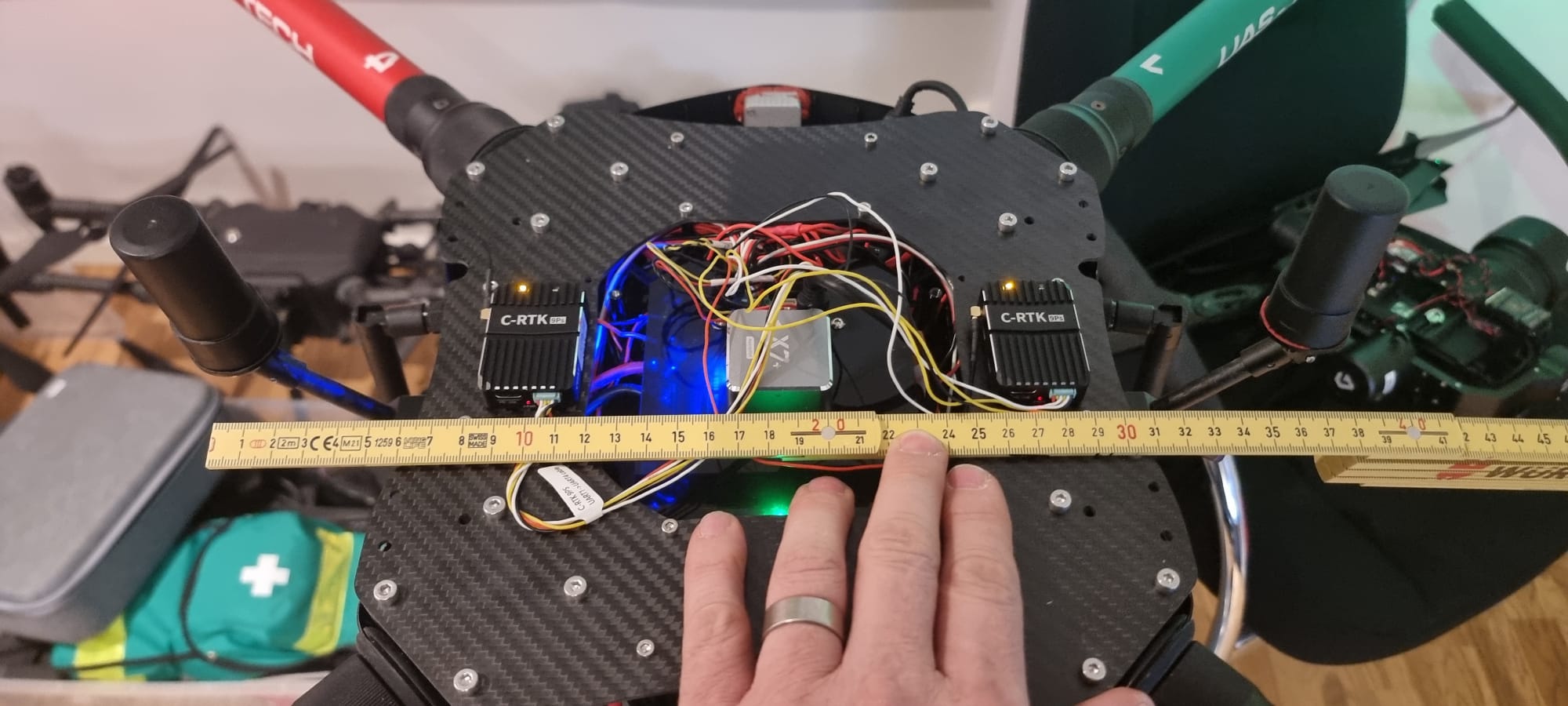
It differences 10 cm.
So, the question is if this solve the problem. It seems like a small difference, but i will try with correct setup. Thanks
And make sure serial 3 connected gps make as gps 1 position offset and serial4 or serial2 ( which serial you connect) make gps 2 position offset values.
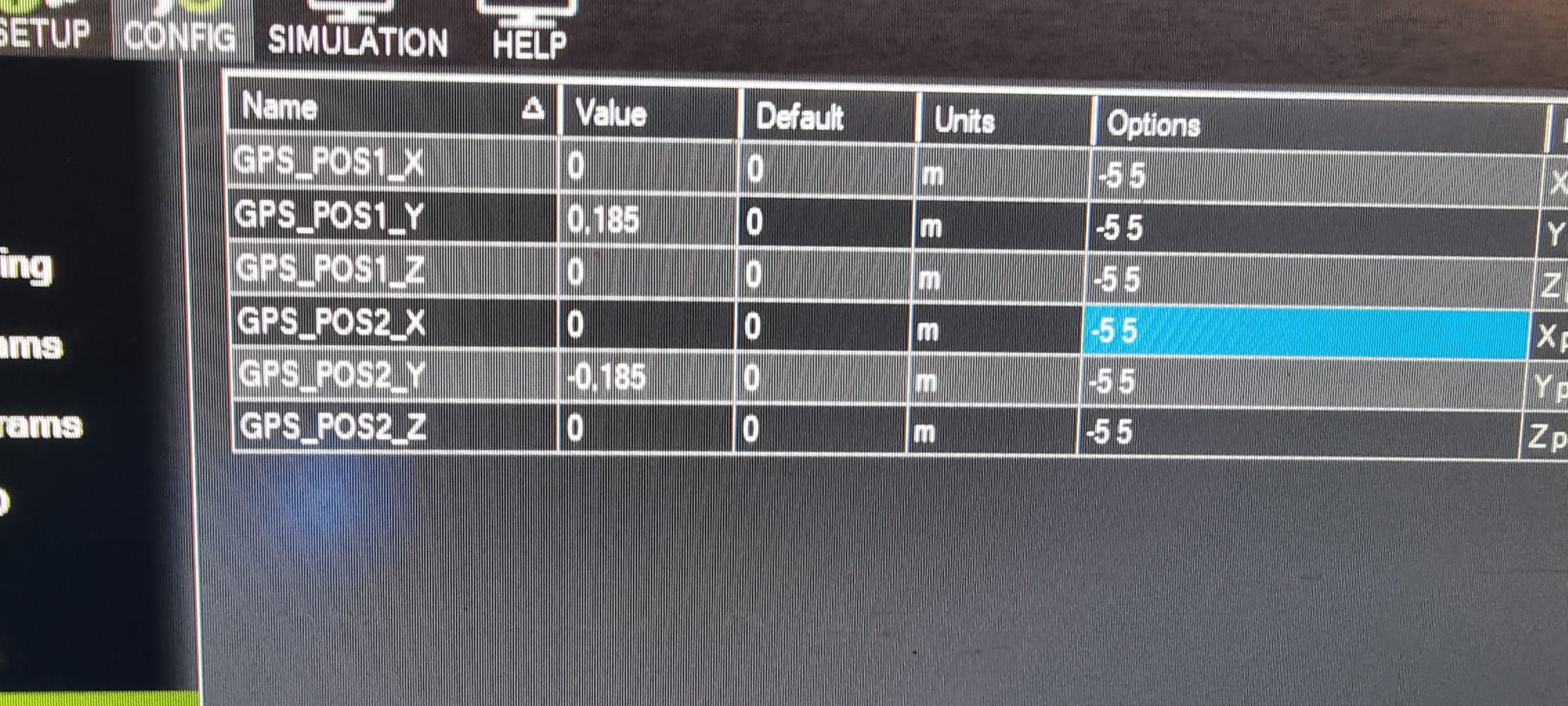
Yes, they are correct attached to right position. The one on the left is GPS2 ( -0,185 ) and GPS 1 is the one on the right ( 0,185 )
What about z axis height of the antenna?
It´s - 0,05 .
Your tips took care of the problem with the heading. It shows correct now. Thanks!
However. I uploaded two new logs. Now i still have the problem with GPS(2) YAW not available, and suddely it says GPS (2) unhealty…
Seems like this drone have a life of its own…
Thanks for all your help!
Gps update rate is 5Hz?
Gps1 is 3dgps
Gps2 is rtk fixed?
Your gps is clear sky view to get good gps position?
Actually changed to 10 hz after reading some about it on this forum. But, since it accured after i changed it, i will set it back to 5 hz.
GPS 1 has either 3D Fix or 3D dgps.
GPS 2 has either 3D Fix or 3D Float. Mostly fixed.
Yes, clear sky. The latest test i did outside off the office, and that is not ideal conditions. Metal fence 6 m away.
I will test tomorrow at the field, as my wife asked for my apperance at home…
I think you mean GPS2 varies between RTK Fixed and RTK Float - and if that’s the case, it’s indicative of the problem. I suspect a poor sky view, but it could also be a symptom of an inaccurate position measurement between the two antennas. GPS2 must have a solid RTK fix before yaw can be provided.
Use the 5Hz rate. 10Hz has been problematic for moving baseline configs.
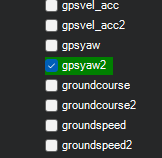
Mission Planner provides an easy way to see if GPS yaw is available. Double click in the “Quick” tab and select gpsyaw2 to see its value. If it is always 0 or always 655.35, GPS yaw is not available.
Thanks. I let you all know the result of this tomorrow. Have a good evening all.
Hi. The GPS2 value is pending between 278 and 279. Quite stable there.
Now i got everything to work on the ground at least.
Heading is correct, and able to arm in all modes.
Thanks!!
I had the same symptoms as described above with dual F9Ps (GPS offsets configured correctly, 60 satellites, however wouldn’t arm due to position estimate needed). It turned out I had the GPS autoswitch set to ‘blend’ (2) instead of ‘use best’ (1). I made that change and everything worked perfectly. Hopefully this helps someone in the future.