I’m preparing China aero design challenge competition .we have designed a fixedwing with the pixhawk (Arduplane 3.7).
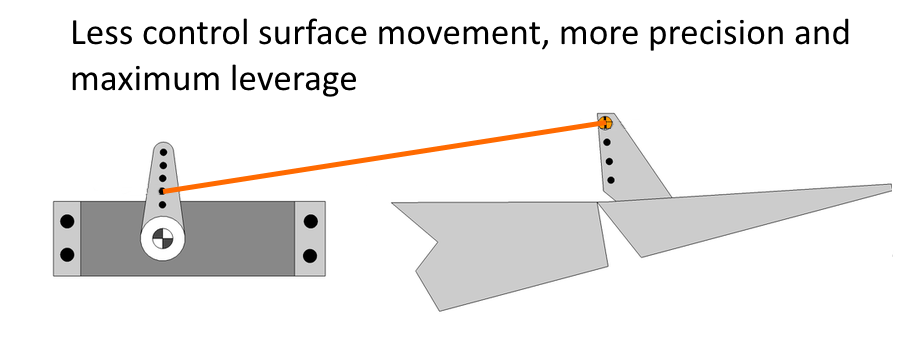
in manual mode and stabilize mode we just use 30% of elevator servo travel.so we set channel 2 to 30% on our transmitter.but after radio calibration on mission planner .in fbwa mode we pull the elevator stick full down,the elevator servo still can move to 100% travel.
I found Parammeters called SERVO2_MAX and SERVO2_MIN in ardupilot.org/plane/docs/parameters.html.But we can’t find them in Mission Planner - Full Parameter List.
I asked this problem in Gitter and be told “you need to be running master(pretty much) to see SERVO2_MAX and friend”.But I can’t understand what is master?