Hi,
In 3.2 we now have frsky telemetry support through the SERIAL2 Port.
copter.ardupilot.com/wiki/common … telemetry/
Current metrics :
github.com/diydrones/ardupilot/pull/1266
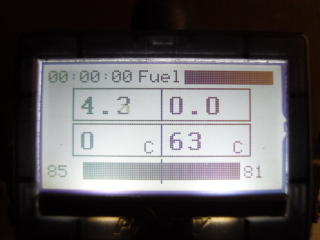
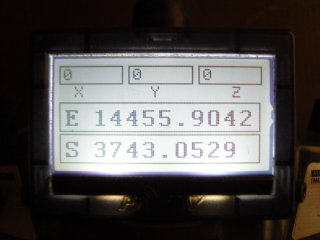
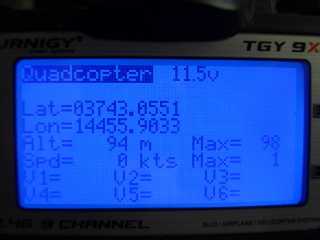
I would like to gather some feedback about what people want to see as metrics (SATS, HDOP, GPS ,…)
So … feel free to comment on this thread, the result of your testing and requests for more functionality.
Support for X-Receiver (S-PORT) is in the work but won’t make it for 3.2 official.
We are in discussion with opentx people to have more metrics in opentx adapted to our needs as currently we are hacking Temperature telemetry and other metrics to meet our needs.
M
NB: This is native support using an inverter, it is different to the teensy solution below which is more advance in term of functionality : diydrones.com/forum/topics/amp-t … -converter