Hello everyone
I have a problem with my drone’s stability. When i’m trying to arm my quad on stabilise or alt hold or auto mode; there is an always issue while hovering. The copter wants to drag on rear right direction. It efects auto mode flights too.
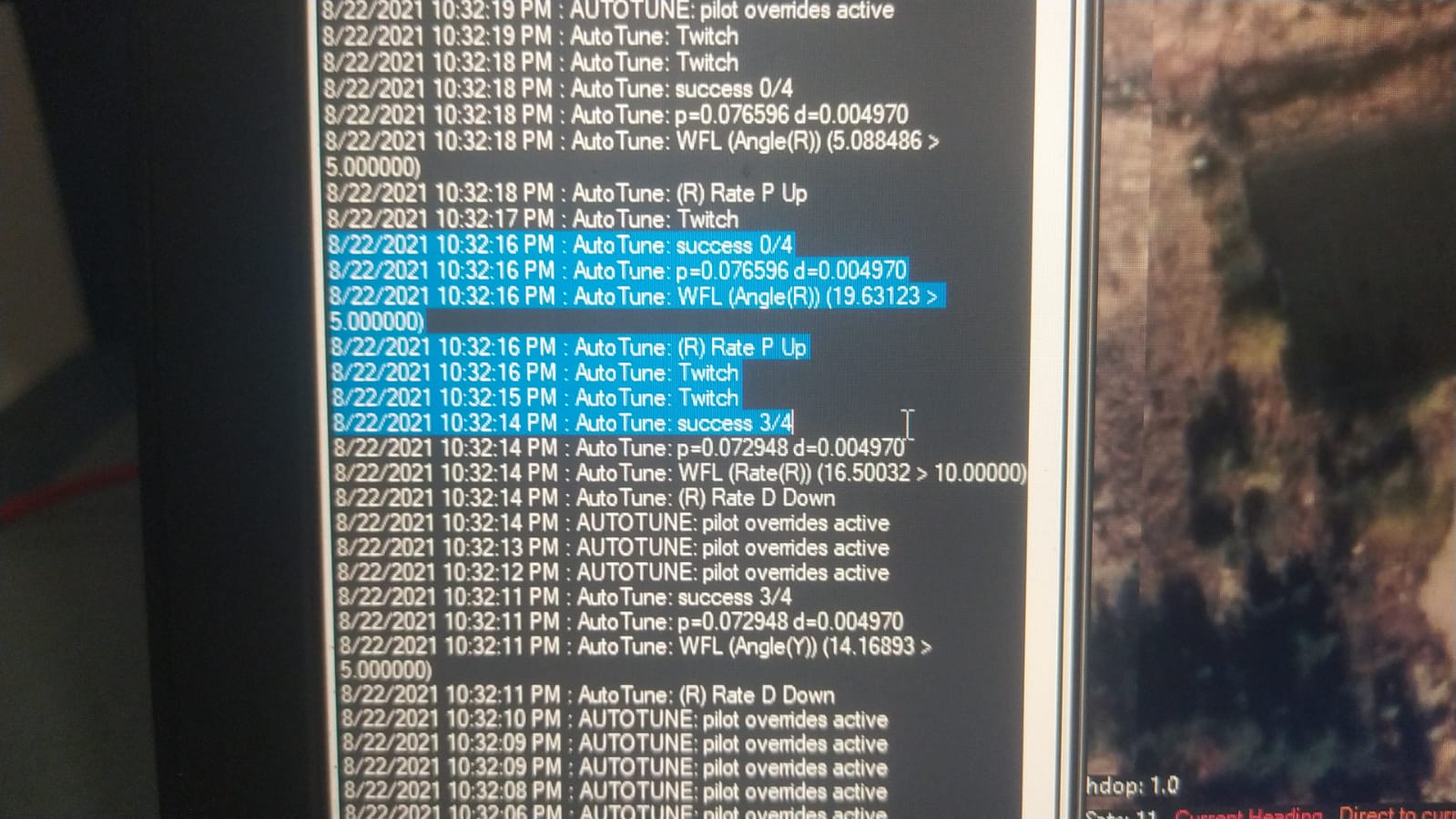
Due to this stability issue, i tried to make Autotune fly 3 times at different times but flights always ends with error. I couldn’t make PID settings with AutoTune mode. I’m adding a screen view from AutoTune flight messages on Mission Planner
Can anybody gives me some advice?
Some informations of my drone --> Pixhawk Cube Orange, Here 3 GNSS GPS, 350mm frame, 8045 props