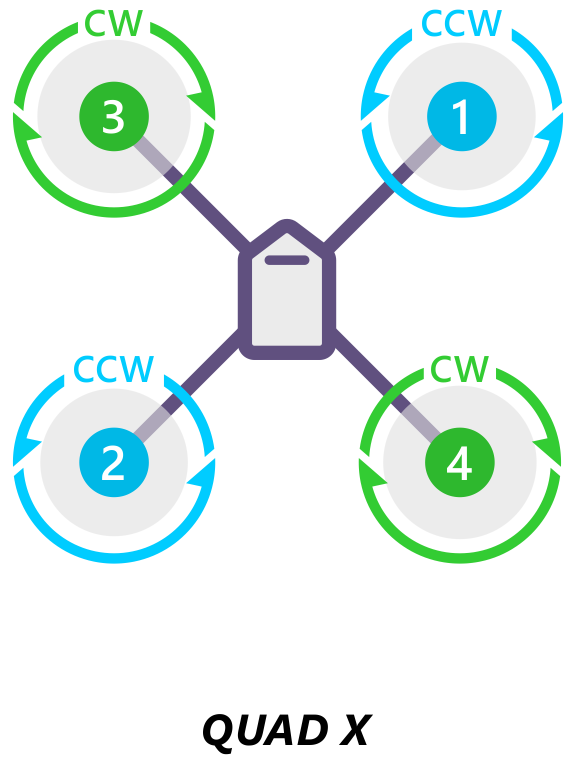
My C9 and C10 seems to always be spinning faster. If they are motors 1 and 2 as on the ardupilot diagram then I just don’t know why this is happening. It can’t be wind because it is standing still largely even in Althold. It does move slightly, but not much
How are your motor mountings, maybe they are slightly off or loose.
In some cases the frame also flex a bit during flight, so on the ground all seems fine but once in the air it might not be perfectly straight and level anymore.
I will rebuild the arms this week and see what that does. I hit a pole on the rugby field today again. I can’t seem to estimate the distance 100m away between the drone and objects and FPV is illegal here so I need to get a FPV LCD screen it seems and probably stop flying myself and just use auto mode.
I will also remove the rubber and see if it makes a difference. Two motors sit on a single solid carbon square tube and the other two each have a carbon square tube. So that might also be part of the issue. I tried to glue the carbon together, but I can’t find the right glue it seems. One long carbon tube and two short tubes
I will also add more nuts and bolts to hold the legs to the base. I tried to re-use the stack nuts and bolts to hold the legs in place but I am thinking I can’t tighten that enough because I might break the PCB’s of the stack.
I can’t get new carbon square tubing quickly enough (I have a job 15 October with the drone) so changing over to 12.7mm x 12.7mm x 1.5mm aluminum tubing for now. The glue might work on the aluminium so hopefully the cross (X) will be stiffer. I can’t go to someone this week to get the frame welded together.
Dont soft-mount the motors, it’s usually worse. Secure any loose wiring.
You’ll need a base plate underneath those arms, like the top plate. That will add a lot of stiffness.
I don’t have a base plate at the moment. I will order more carbon from HobbyKing. There seem to be issues getting things in from HobbyKing at the moment. Their Australian warehouse is in Singapore.
I rebuilt the drone to use aluminium legs (10mm U shape). I will try 25mm U shaped aluminium next and see if it gives me different results. The 10mm I can twist with the motor on the end. That can’t be good. The 10mm square carbon had the same issue.
I ran out of 260KV motors because with every crash the motor mounts break and the motor that hits the ground first rips its wires off so I am using 2 of my old 530KV motors on Motor position 1 and 3 so C9 and C11 and 2 of the 260KV motors on 2 and 4 so C10 and C12.
I didn’t autotune this setup yet because the wind is strong today. Gusts up to 38km/h.
This is a very interesting graph. RCOU C9 has a flat base. That is a 530KV motor. I would think the C11 would look about the same because it is also a 530KV motor.
I didn’t expect it to fly so I was surprised. It does have a hickup sometimes where it starts to sway forward and back uncontrollably then I need to take it out of loiter and put it in althold and back into loiter. You will see that in the graph. It did the same before when I had all 260KV motors. So it gets confused about something.
Hopefully my new motors will arrive soon. With the 25mm aluminium legs I will move away from motor mounts and just make holes in the legs to mount the motors directly onto the leg. That should guarantee a flat motor mount.
Looks like I will be over 2kg if I want something big and stable so I see a ±$1300 license in my future.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}