You could look at http://www.euref-ip.net/ to see whether there are RTK correction sources near you. I’m using an RTCM source about 21km from me (and feeding that correction to an ardusimple board) and getting decent accuracy, about a 10 cm drift from day to day which is sufficient for my application (robotic lawn mower).
Really appreciate the info Christopher. I have looked through the data but can’t find anything in London or close to it. I found one in Daresbury which is 174 Miles away from me so I doubt that distance is any good. Maybe there’s more closer to London in the data but I’m not sure
Just spoke to this company who provide RTK coverage where I live. Annual Fee: £600😳 I could buy the Here+ RTK kit for that cost.
It is not easy to find sources of RTCM/RTK corrections as there is no robust repository. I really had to poke around to find mine. I bet if you keep looking you’ll find one. Maybe post on this thread https://www.ardusimple.com/question/finding-correction-sources-casters-near-me/ and see if anyone has any suggestions. After all London is kind of a big village and there’s got to be a free provider somewhere there.
This sourcetable has some sources listed in GBR http://www.euref-ip.be:2101/… You could poke around there to see if there’s one near you (using lat & long from the sourcetable).
… or you could buy 2 Ardusimple boards (one as a ground station and one for your rover) for 398 euro on their special sale.
Can these base stations be used with the Here 2 GPS that I already own? From my understanding the Here RTK uses the Here+ gps module. I have the Here 2 module.
Also I found one that’s 45 miles away from my location. Not sure if that’s too far to pick up the signal.
How do you add the info in order to see if it can pick it up? I’m using Mission Planner with the Pixhawk Cube 2.1
This is the closest station to me in the list you’ve shown me, not sure where the code starts and ends:
3.2;1004(1),1006(10),1008(10),1012(1),1013(10),1019,1020,1033(10),1230(10);2;GPS+GLO;EUREF;FRA;43.40;-1.68;0;0;LEICA GR25;none;B;N;400;rgp-ip.ign.fr:2101/SCOA1(1)
STR;SHOE00GBR0;Shoeburyness;RTCM 3.2;1005(5),1007(5),1019,1020,1033(5),1073(1),1083(1),1093(1),1123(1),1230(5),4094(5);2;GPS+GLO+GAL+BDS;EUREF;GBR;51.25;0.83;0;0;TRIMBLE NETR9;none;B;N;2000;ntrip1.os.co.uk:2101/SHOE_RTCM(1)
Also Christopher I’ve just seen this post:
Very cool😎
I don’t have a Here 2 GPS so don’t know. What I do know is that you need a GPS capable of receiving “RTK” or “RTCM” corrections. I do not think your Here 2 GPS is RTK/RTCM capable. This page http://www.proficnc.com/all-products/152-gps-module.html talking about the Here 2 GPS says “Positioning Accuracy 3D Fix” where as this page http://www.proficnc.com/gps/77-gps-module.html (for the “Here+ V2 RTK GNSS”) product is clearly an RTK product.
I’m a little apprehensive on powering the PX4. I have a Traxxas chassis and plan to power it with the ESC and battery that came with it. To power the PX4, I’d like to connect an A123 battery (~6.5v) directly to the servo rail and to plug in the servos for the ESC and steering servo also in the rail. Is this ok?
Chuck
The module you have does not support RTK.
Normal Operation Maximum Ratings
Power module input (4.1V to 5.7V) [refers to the voltage coming into Pixhawk from the power module]
Servo rail input (4.1V to 5.7V)
USB power input (4.1V to 5.7V)
It amazes me how many people choose not to use a dedicated power module to power the FC. I think however you can power the servo rail higher but it will not be used for FC power. I keep my servo rail at 5.6v just so it is available if needed.
1 Like
You guys told me to use the power module like 100 times before I finally did it. The benefit being you can see how much power you have available & put fail safes in place just in case
Plus you get nice clean consistent power coming into the F.C. I’ve seen logs of power graphs with no module and it is an accident waiting to happen.
I’m horrible frustrated, I can’t get my compass offsets to where the Ardurover can be armed. Keep getting the “Compass Offsets Too High” message. I’ve tried both options, general and onboard, probably 10 times, both inside our house and outside. Residential area, open space to the back of the house. Any suggestions?
Chuck
Pixhawk PX4
mRo GPS u-Blox Neo-M8N BGP + Duo Mag + USB
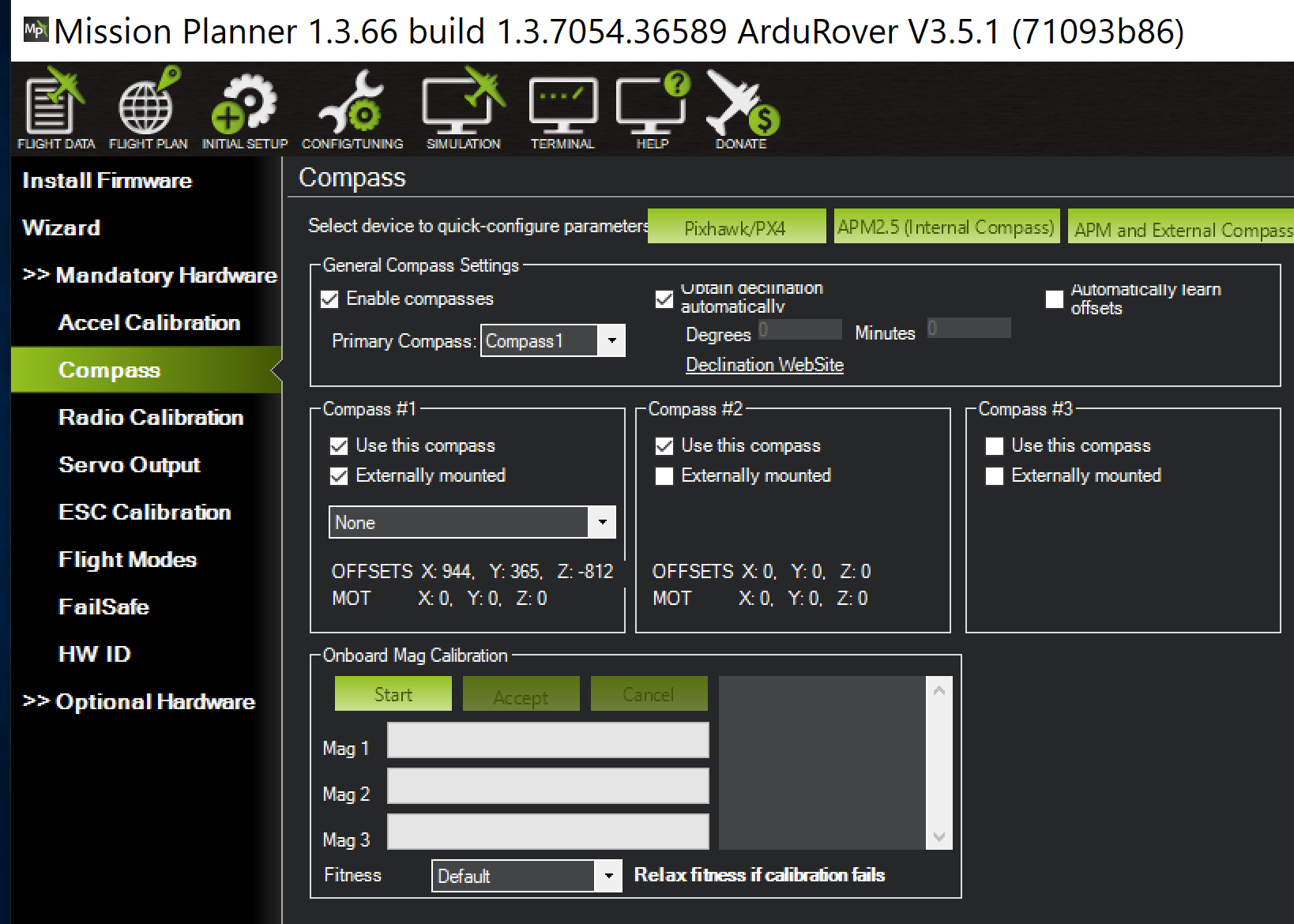
Those are some high numbers… You may be able to change COMPASS_OFFS_MAX to like 2500 and get it to arm.
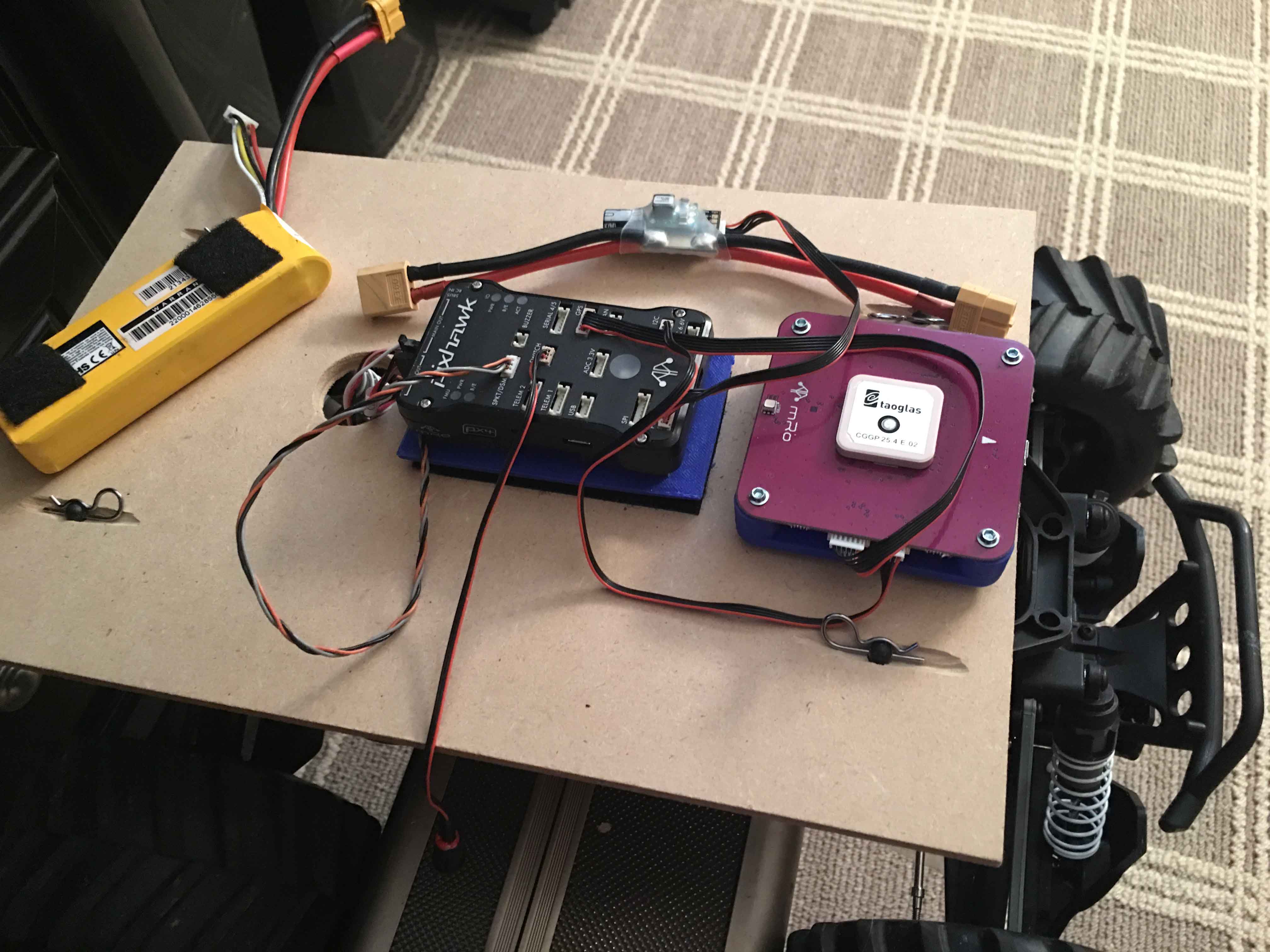
Yea, crazy high. Where is it mounted? Got a photo of the vehicle? Which Pixhawk PX4? Wondering why it doesn’t show an internal compass. Posting a parameter file might be useful.
1 Like
I changed the COMPASS_OFFS_MAX to 2500 as suggested and now there isn’t any problem with arming. Now the issue is with calibrating the ESC which is a Traxxas XL-5. I’m using a DX-9 and am not getting the various flashing lights on the ESC. I hooked the ESC separate from the PX4 to a receiver and was able to get through the flashing light and stick movements until the stick was moved to neutral, then nothing. The motor wouldn’t go. Back in the PX4, I had to make some adjustments to get the throttle end points in order to get the servo output from 900 - 1900. The steering servo will work with a 6.5v battery attached to the power rail. Again, any help would be deeply appreciated.
This is what I bought:
Blockquote
1 Like
Post your parameter file. You should be seeing 2 compass’s, one on the Pixhawk and one on the GPS Module. The screenshot you posted only shows one so it’s not clear which one is active. The parameter file will show this. You may want to mount that GPS module on a stand to get some isolation. Why are you not using the ESC BEC to power the servo? Use the power module for the FC (looks like you are) and power the servo direct from the ESC BEC.
Dave,
Never created or posted a parameter file before. Hopefully this is correct, if not let me know.ParameterTree.param (13.0 KB)
My understanding is that the throttle lead from the ESC is bring power to the PX4 power rail, however the steering servo doesn’t work when the throttle lead is plugged in. When I plugged the 6.5v battery in, the servo did work. That seems strange to me. I am using the power module for the FC. Also, I will build a stand for the gyro once this ESC calibration is resolved
Chuck
Yes, that the right file. You have the MOT_PWM_TYPE set to Brushed which usually is not required for the type of ESC you have. I have used several Car/Truck ESC’s and they all work with normal PWM (parameter 0). This could be your problem with the steering servo as it will set a entire group of channels to Brushed.
You have 1 compass being recognized and it appears to be the Pixhawk internal one. The device ID (131594) is for a LSM303D which is on the PIxhawk. Specs say the GPS module you have has a LIS3MDL and a IST8310, neither of which are being identified. I don’t know why, contact mRo about it. An additional check you can do is on the Mandatory Hardware>HW ID page. Post a screen shot of that.
Note: You have the safety switch configured as active. OK, as long as you know this. I never use them on any craft. Also just a suggestion. Switch arming is a lot easier to use than stick arming.
1 Like