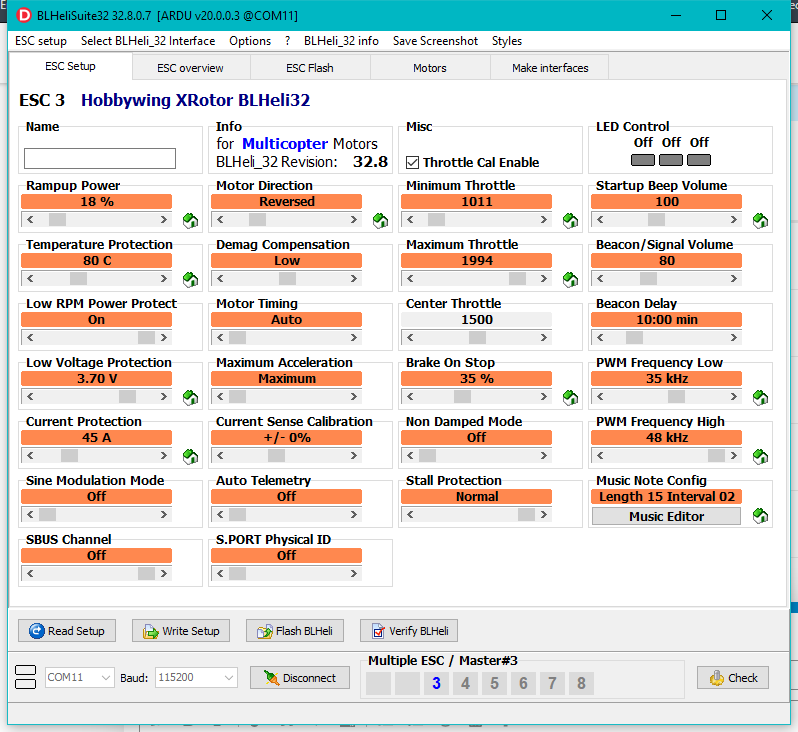
Hi, I am making octa-quad copter I used pixhawk 2.4.8 and 2 Hobbywing 4in1 esc connected in parallel to battery and signal wires connected to main output form 1 to 8 in pixhawk I followed all instructions Ardupilot docs for first time flight setup but I had a problem with motors that motors stop spinning while throttle and while motor test from mission planner immediately for 1 second then continue spinning I made ESC calibration several time also I tried to use Dshot 1200 protocol over aux outputs for 6 motors but I couldn’t solve the problem. I attached a photo for ESC Blheli settings
I tried with these settings also
- Rampup power = %50
- Sine modulation = on
- non Damped Mode = on
- Motor Timing = 16 deg
- Brake on stop = off
but nothing solved my problem, I think the problem stems from pixhawk but from which parameters and why please help