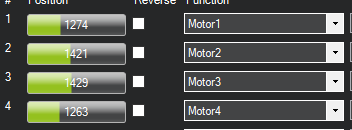
I have done all the calibrations such as esc, motor, accelerometer, compass and my device is standing on a flat place and I see this on the screen, but when I arm and give only gas, it seems like almost no signal goes to my 1st motor also 4 with 50% gas, what is the reason for this?
You can not expect the motors to have the same throttle on a flat surface.
Please read the many posts on this forum about open loop!
1 Like
my question is; but wouldn’t the motors need equal power for the drone to rise straight up?
Did it leave the ground? If not this test is meaningless the same as if you had no props.
1 Like
no, i did not install the propellers.
Then don’t waste further time with this. Use Mission Planners Motor Test function to test motors on the bench.
1 Like
hm okay, Take off slalom Problem after this i have faced this problem as i mentioned. This makes it clear that it has nothing to do with the motor test case I mentioned, right?
Same things asked again and angain and again…
Indeed.
I try to come up with a very simple example of why this occurs but even the most basic example, say cruise/speed control in a car, still requires a mention of closed loop control, sensors, command signal, feedback and error signal for a comprehensive answer. So, then it’s not a simple example anymore.
1 Like
this has come up at least 20 times on the forum already, it takes just a little patience and some search…