Holybro Pixhawk 4, 1 week old
Copter 4.0.7 OFFICIAL
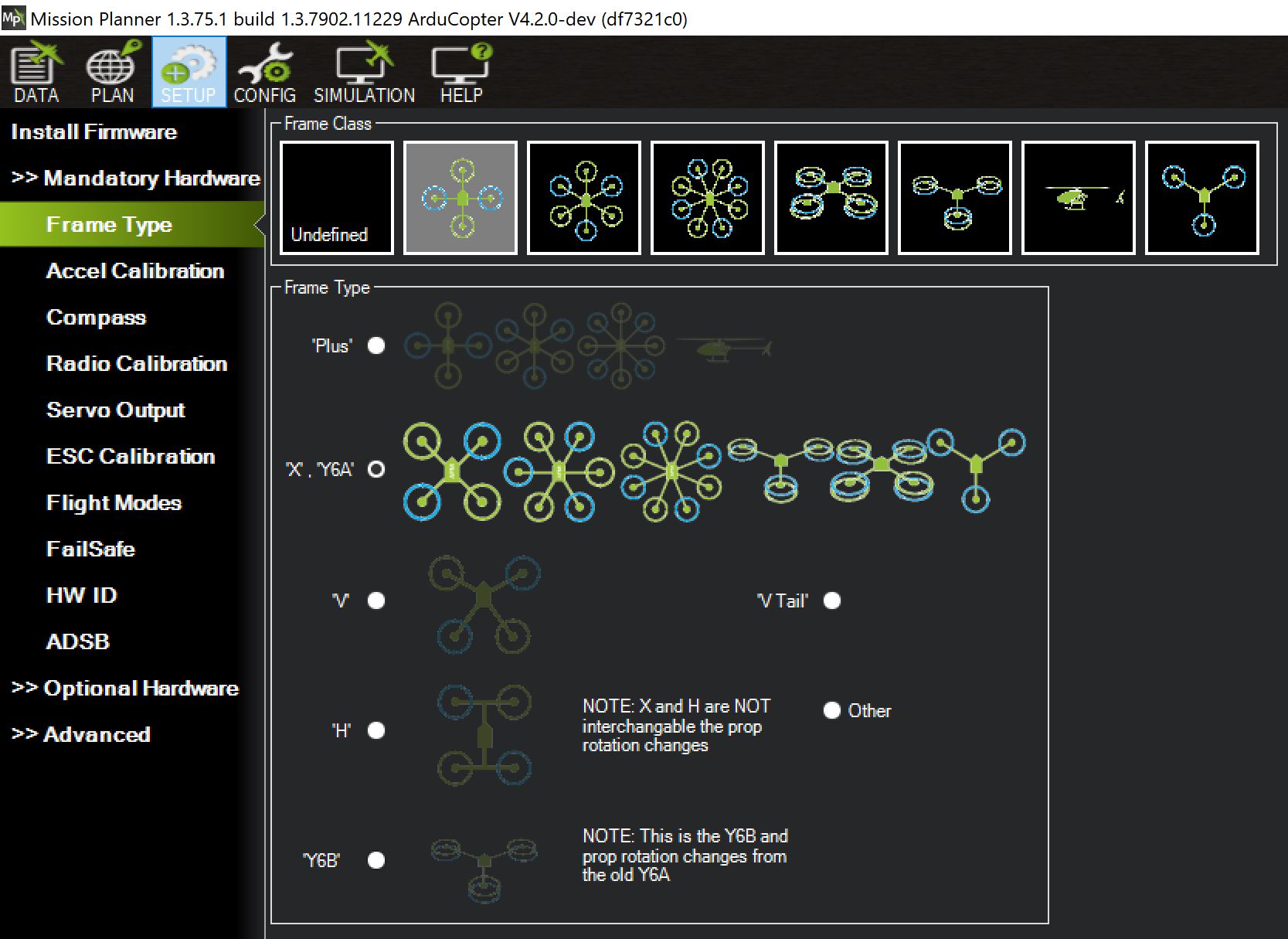
Frame Type: “X”
ESC Type: Normal
ESCs 1 to 4 connected to Pixhawk4 IO PWM OUT, pins 1 TO 4, respectively
I buzzed these out to ensure proper wiring
Servo Outputs 1 to 4 connected to Motor Functions 1 to 4, respectively
Servo Outputs 5 to 8 all Disabled
When I first did the Motor Test “Test all motors”, all motors started up and ran properly in the correct direction. When I ran “Test all in sequence”, the motors ran out of sequence, with large time gaps between motors.
Using an O’scope, I ldid some troubleshooting and found the following:
Using Motor Test to test each motor individually, I found:
a. Test Motor “A” drove pin 1 (correct)
b. Test Motor “B” drove pin 6 (incorrect)
c. Test Motor “C” drove pin 4 (incorrect)
d. Test Motor “D” drove pin 7 (incorrect)
I then went to Servo Outputs and connected, one by one, in turn, Servo Outputs 1 to 4 to
RCIN3 (throttle). When I advanced the transmitter throttle, motors 1 to 4 ran
properly, as determined by the current Servo Output.
My most important question is "Based upon the above, is it safe to fly the copter?’
Note that I just finished building a hexcopter and a quadcopter, running 4.0.7, each on a
plain vanilla Pixhawk and everything is perfect. The current build uses a Pixhawk4, and
that is the one having the Motor Test problem.