I’m opening that discussion because i’m investigating on the question that regards the motor speed on both prop’s on a same counter rotating “CR” set.
=> The idea behind is to evaluate the benefit of using different pitches on top and bottom propellers.
The bottom propeller receives an air flow with a different speed than the top one obviously, so why should be they be the same !?
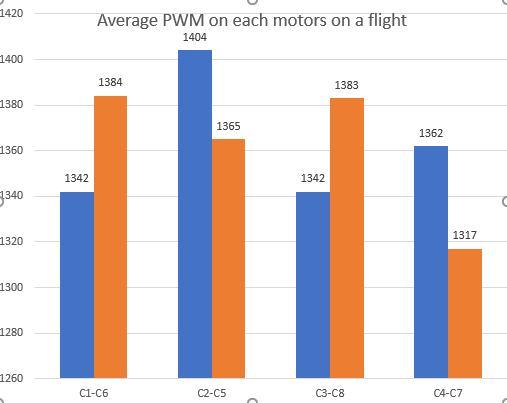
I investigated in the log and found that 2 CR prop’s are not receiving the same RCOU, value is a bit lower on one (not necessary upper or lower)
Relatively parallel as this:
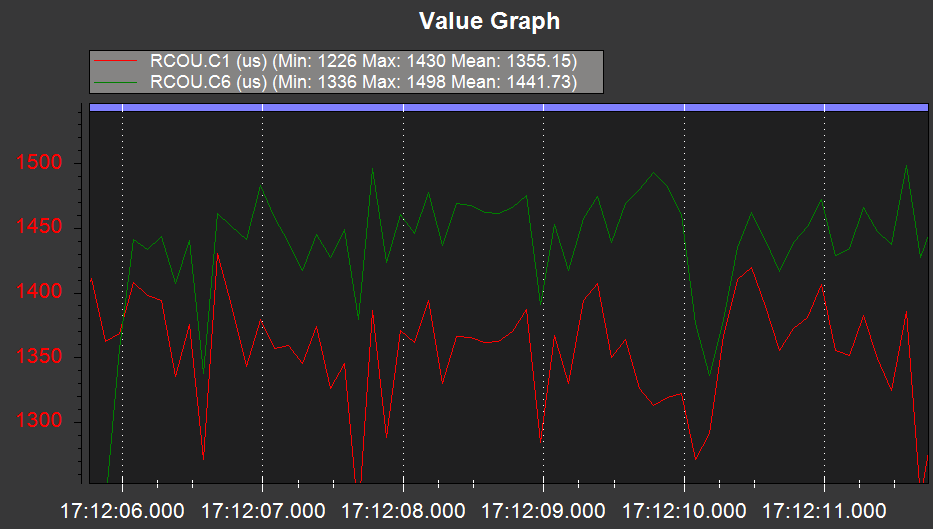
But what seems curious to me is the fact that sometime they go in opposite direction:
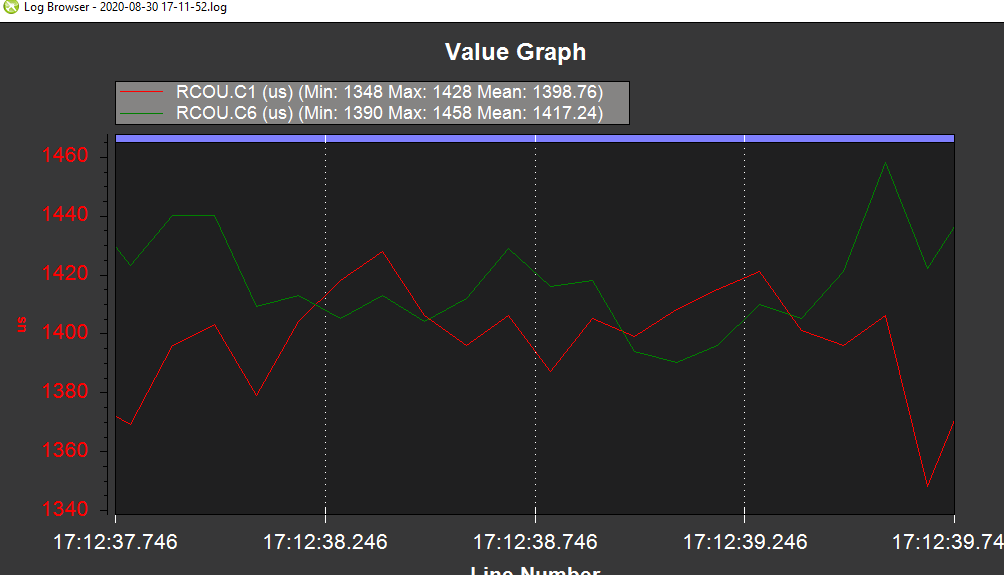
- What information can autopilot use to decide this ?
=> it does not know the speed of each motor, neither current in each motor …
If someone can give us some information on this ? this would help the investigations
My next try is using 1047 on top and 1055 on bottom, i will try to evaluate if the drone takes less power while hoovering or even increases the max thrust…
 ), well, this will be helpfull, will be interesting as well to see how the Autotune will handle different prop’s on top & bottom.
), well, this will be helpfull, will be interesting as well to see how the Autotune will handle different prop’s on top & bottom.