Hi
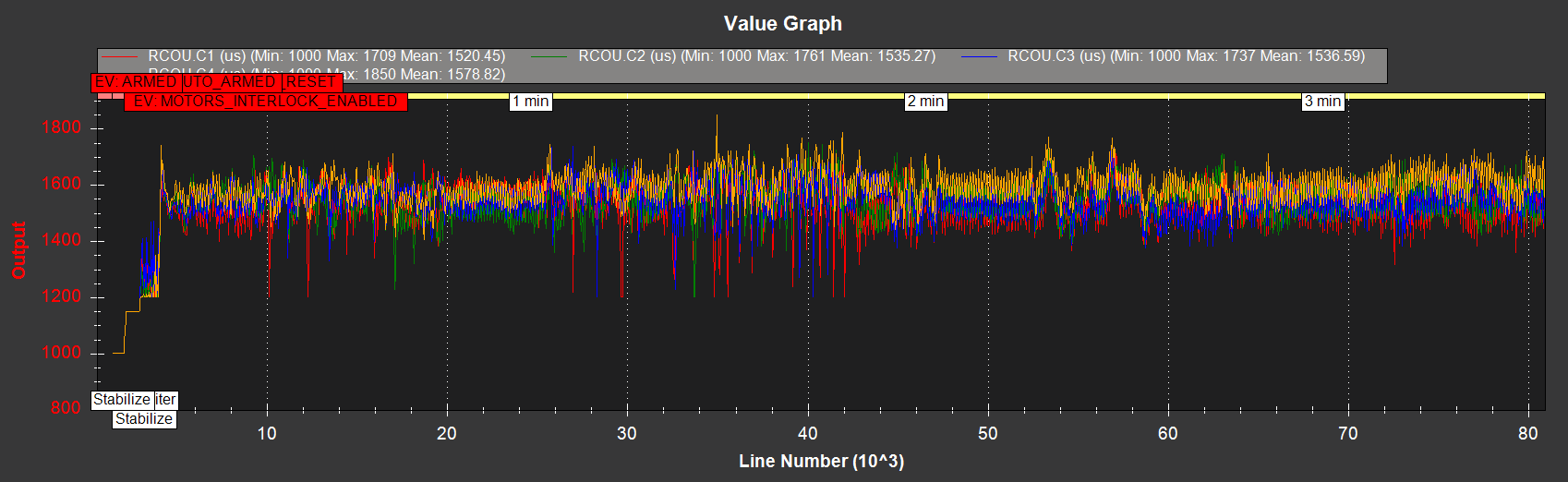
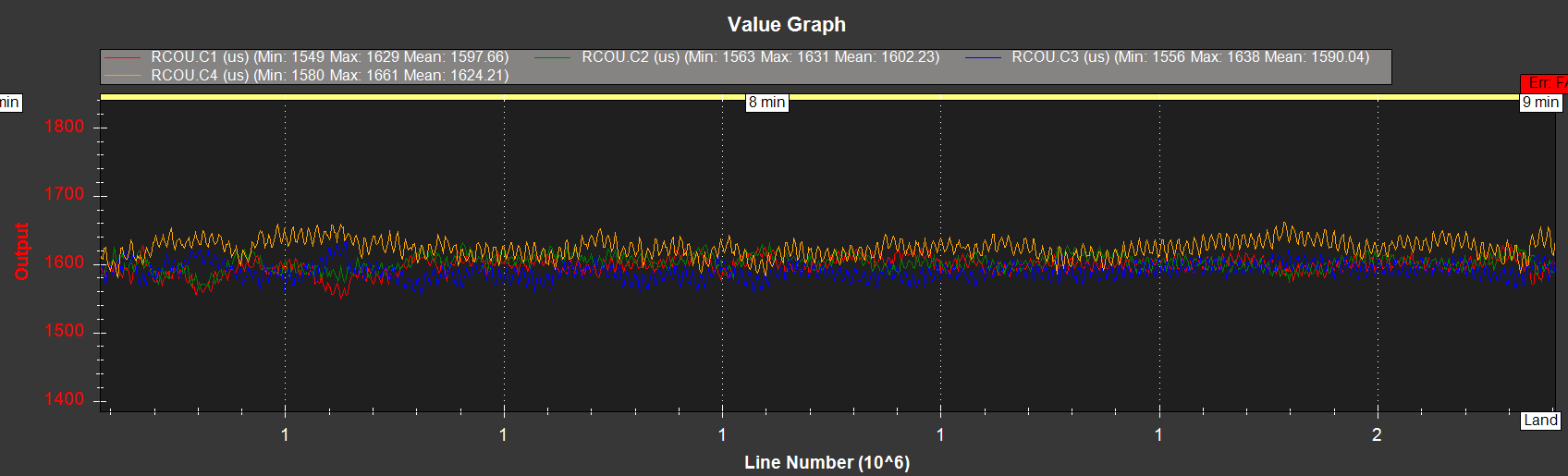
copter was fly good with default PIDs without any motor overshot but after autotune i can hear we we we we sound from motors and its visible in RCOUT values
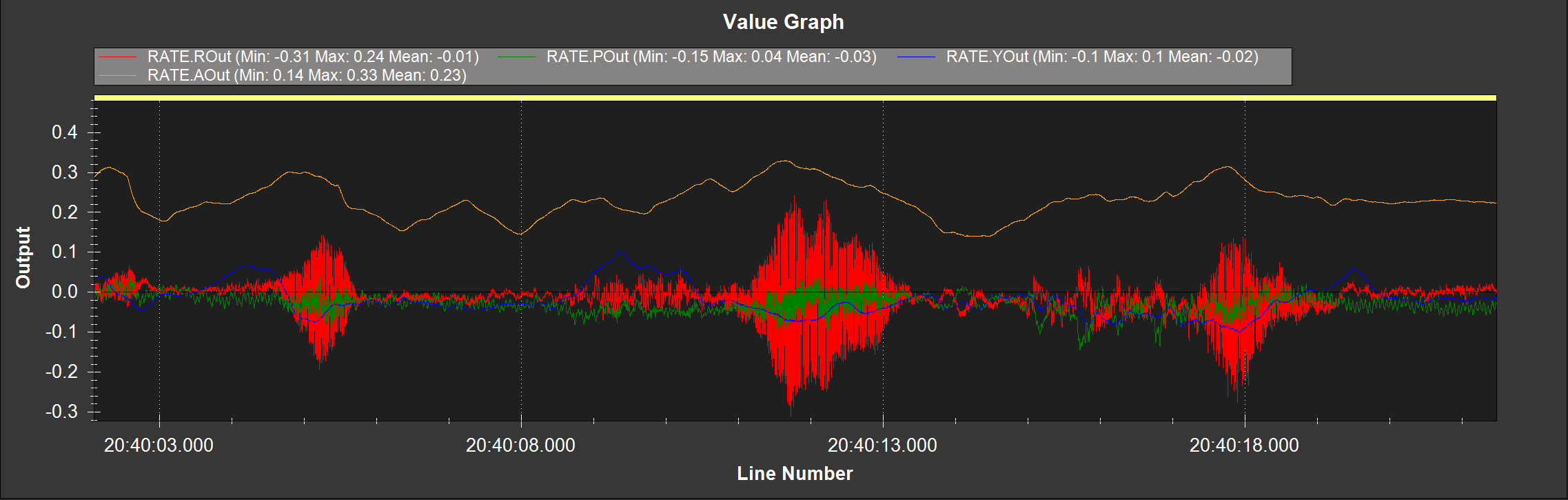
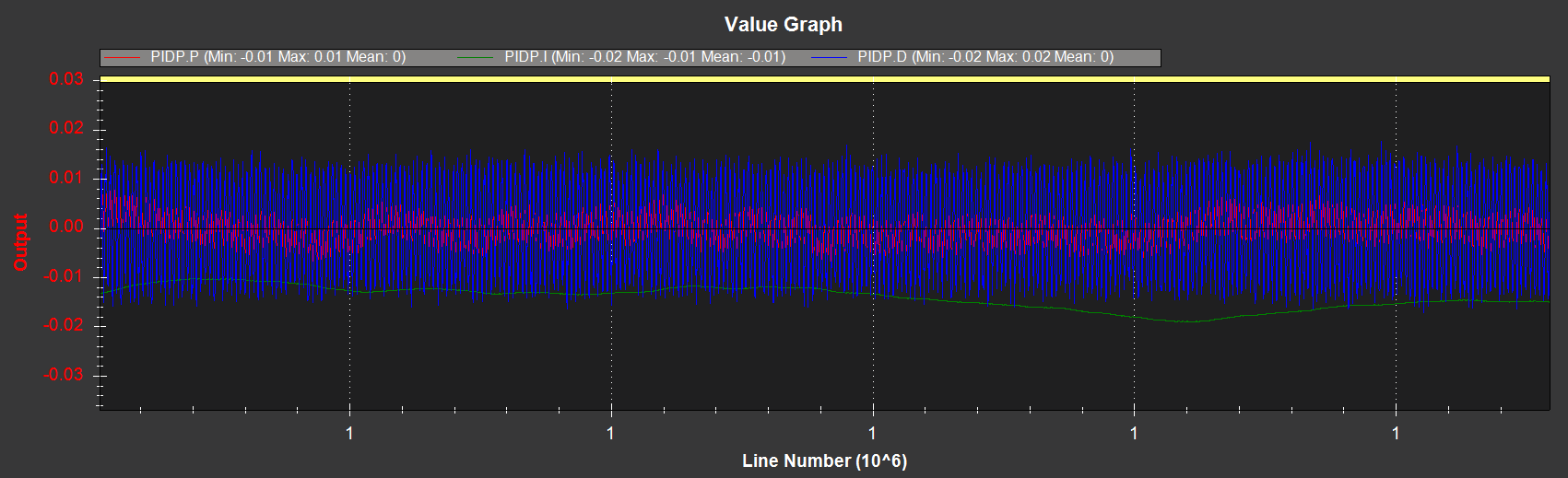
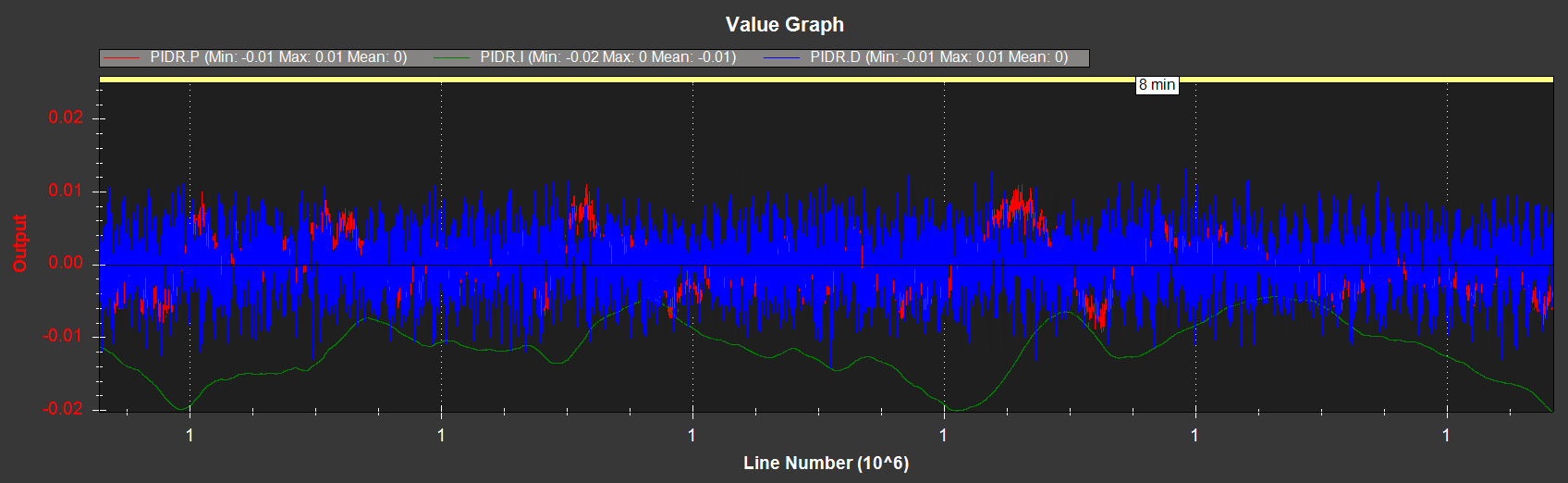
Yeh, there is a 63 Hz oscillation in roll. This is also primarily from the D term.
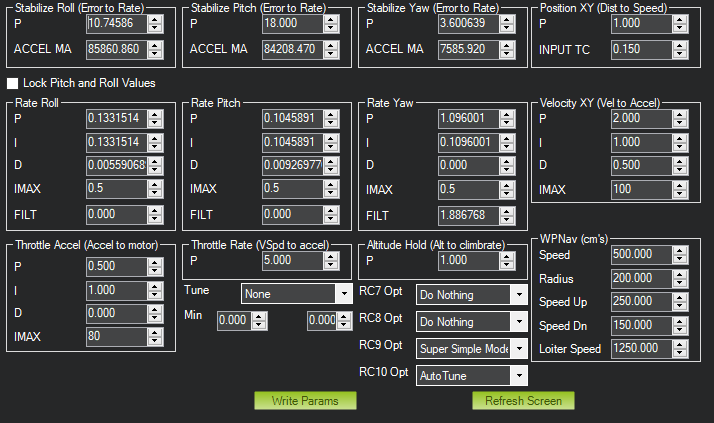
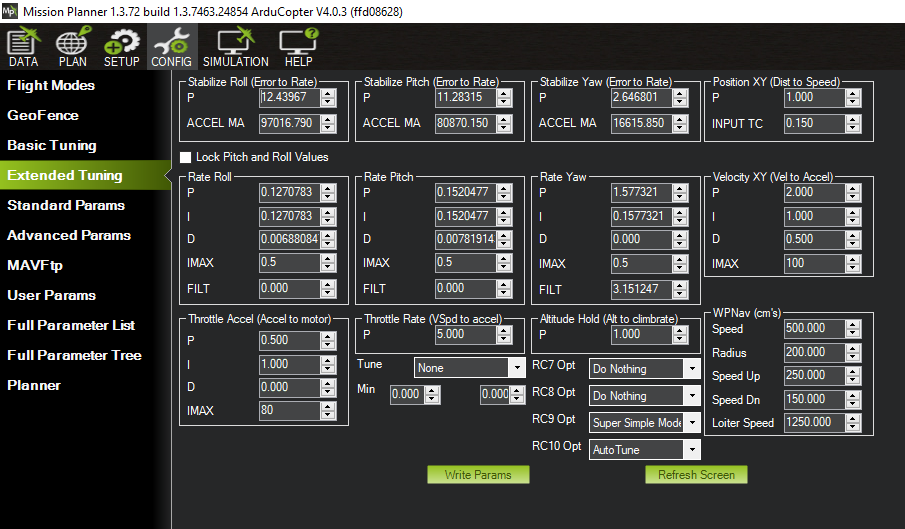
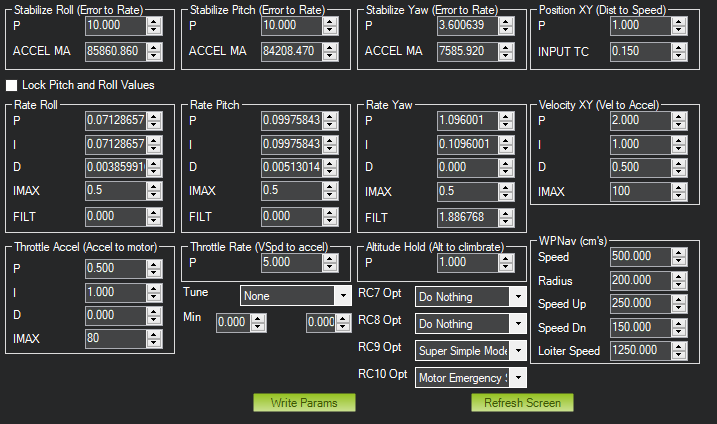
It looks like you have done an auto tune but then copied the D term between roll and pitch but not the P or I term. What was the Autotune values? Based on your picture above it looks like you copied roll to pitch. Maybe that is why we are seeing this problem only on roll. You have already decreased the D term on pitch. I confirmed from your autotune log that you have copied the Roll D to the Pitch D.
This may be partially because your harmonic notch frequency or REF isn’t quite right.
I would suggest going back to your autotuned values.
Drop both the angle P for roll and pitch to 10.
Then backing off your PID values on roll by 25% steps until the problem goes away.
You should double check in the logs that you don’t have pitch oscillations too with the autotuned D term.
You can see that it is mainly in roll but you may see it in pitch too with higher Pitch D term. In that case you would need to reduce Pitch in steps of 25% too.
Hi @Leonardthall
i did your suggestion again and now everything is now much better
copter is completely stable and flies good
but still i have a little bit motor overshot and i was couldn’t resolve this little overshot by playing with PIDs
My much less informed opinion is to set INS_GYRO_FILTER,20 and do another test flight and lets see the .bin log from that.
AUTOTUNE_AGGR,0.1 if you are going to run autotune again
i did this may times but no luck manual tune.param (17.2 KB)
today i manually tuned copter with these values
then did an autotune but new values very high again and copter oscillating
it seems that autotune will not help on this build but i will try backing off all PIDs generated by autotune with 10% steps to get good PIDs