Hello,
We had an incident this morning that I think may be an ArduCopter bug. Sequence of events:
- Drone goes out and completes a regular spray mission.
- After returning to home and almost landing, the pilots switched the drone into guided mode after the LAND_COMPLETE_MAYBE event fired.
- Drone climbs back to 5m (as commanded by GCS).
- LAND_COMPLETE fires when the drone is 5m in the air, leading to motors disarming and a hard landing.
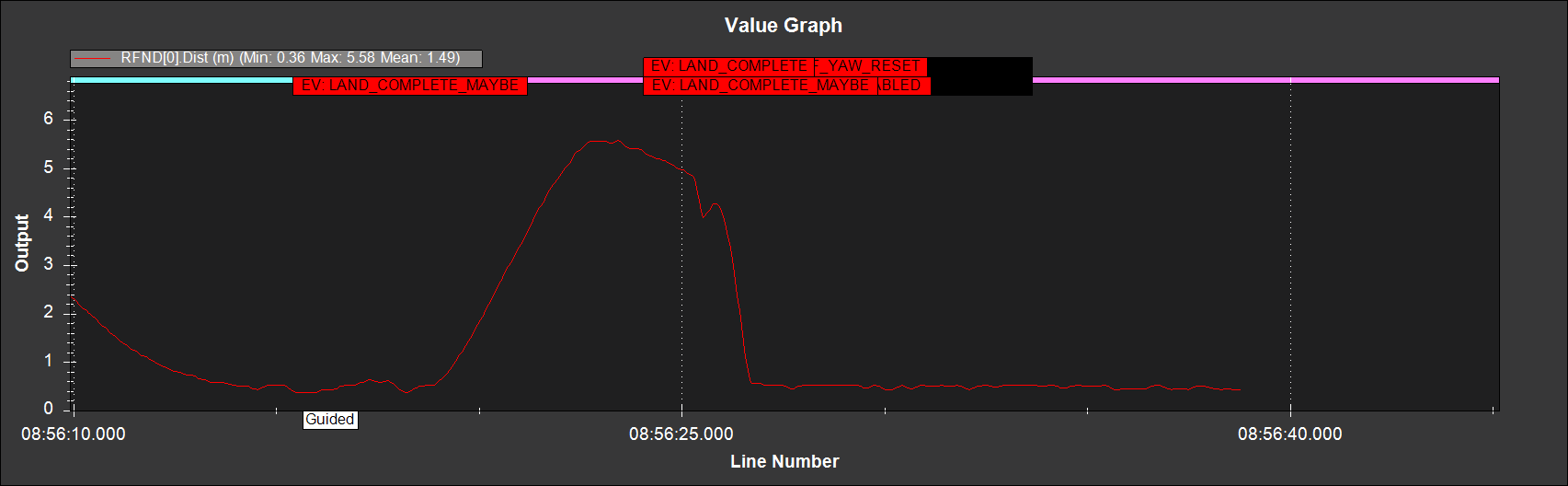
@rmackay9 is there some known issue where guided mode should not be entered when the drone is in LAND_COMPLETE_MAYBE state?
Log:
