Firmware is vCopter 4.1,I find param MOT_THST_EXPO in advanced setting,but it does not exit.Whether this param is optimised away?
It hasn’t changed in the code, are you using MissionPlanner? Tried updating MP?
1 Like
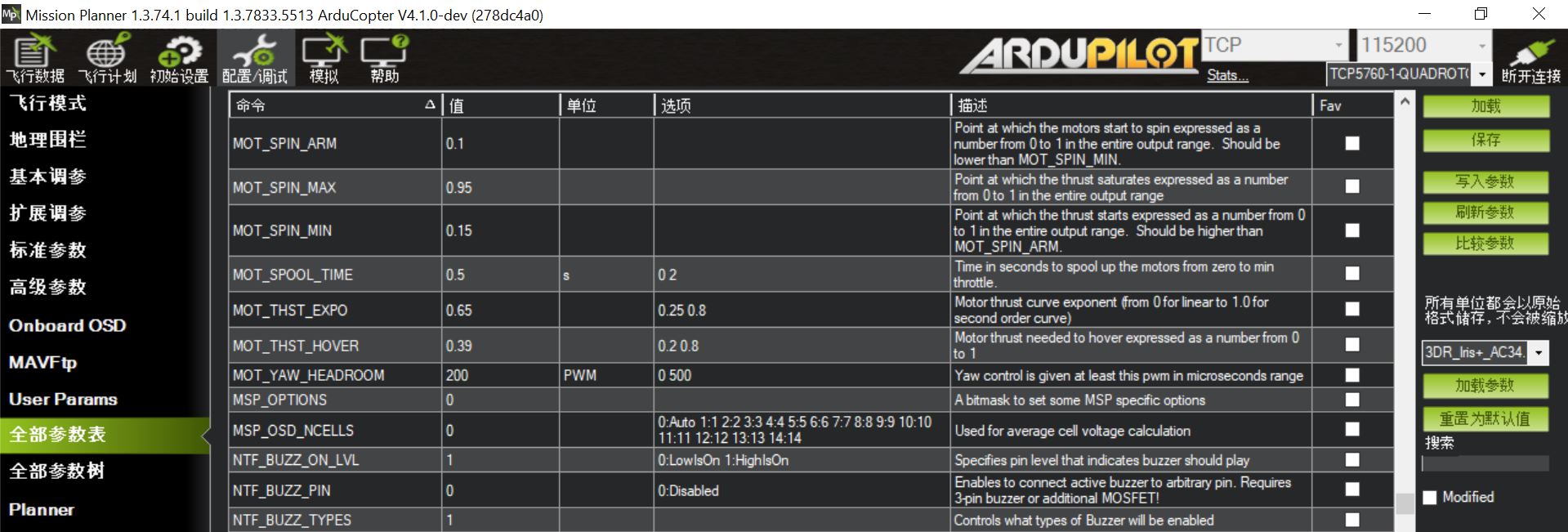
You should find it in Full Parameter Tree under MOT
MOT_THST_EXPO
In this version of MP,I cannot find full param tree at left colunm,confused 
But my screen shots are something different from yours
Probably because you don’t have Advanced selected. I have no clue about Chinese but this is easy enough to find. See it?

1 Like
Follow your instruction,I do it!,thank you so much
1 Like
hi bro,I further do some work of tuning FFT analysis,however FFT_ENABLE is not found.whether this param is something like doing setups up earlier that can activate this FFT_ENABLE?I already do the instructionhttps://ardupilot.org/copter/docs/common-imu-fft.html
What flight controller?
pixhawk 2.4.8,stm32f427
I’m not sure In-flight FFT is enabled on that FC and even if it was an F4 is probably insufficient to run it with stability. F7 minimum, H7 best. Use ESC referenced or throttle.
As you said “F4 is not sufficient for in flight-FFT”,but in this page which explains the Limitations on AutoPilot Hardware,https://ardupilot.org/copter/docs/common-limited-firmware.html#common-limited-firmware
What firmware target are you using? In this example it’s Pixhawk1-1M V4.1.0 beta 4. What do you have?
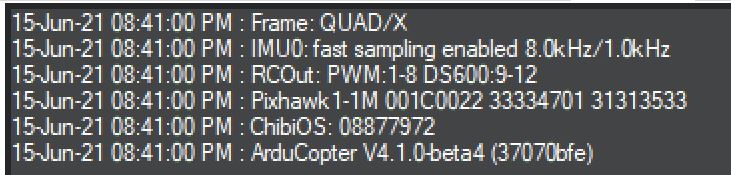
Load Pixhawk1 V4.1.0-dev and see if the parameter is there. From the Install Firmware screen in Mission Planner hit Ctrl>Q for the Dev versions. If you don’t want to try that, it’s the end of this post.
I have tried FFT on F4’s and the processor load is high.
I agree with @dkemxr that the FFT feature is not available on the Pixhawk-1MB board. I’ve added an item to the wiki to-do list to fix the wiki. Thanks for the report.
I got this,but new issues come,copter will lose some stablize performance without FFT,whether it means to make up for the performance that needs more sensors?