Firstly, the FAQ about this forum states:
This is a Civilized Place for Public Discussion
Please treat this discussion forum with the same respect you would a public park. [emphasis mine]
[…] keep this a clean, well-lighted place for civilized public discourse.
This is put right at the start of the FAQs, and for good reason, I believe. So I encourage to keep this civil and respectful, in word and in attitude.
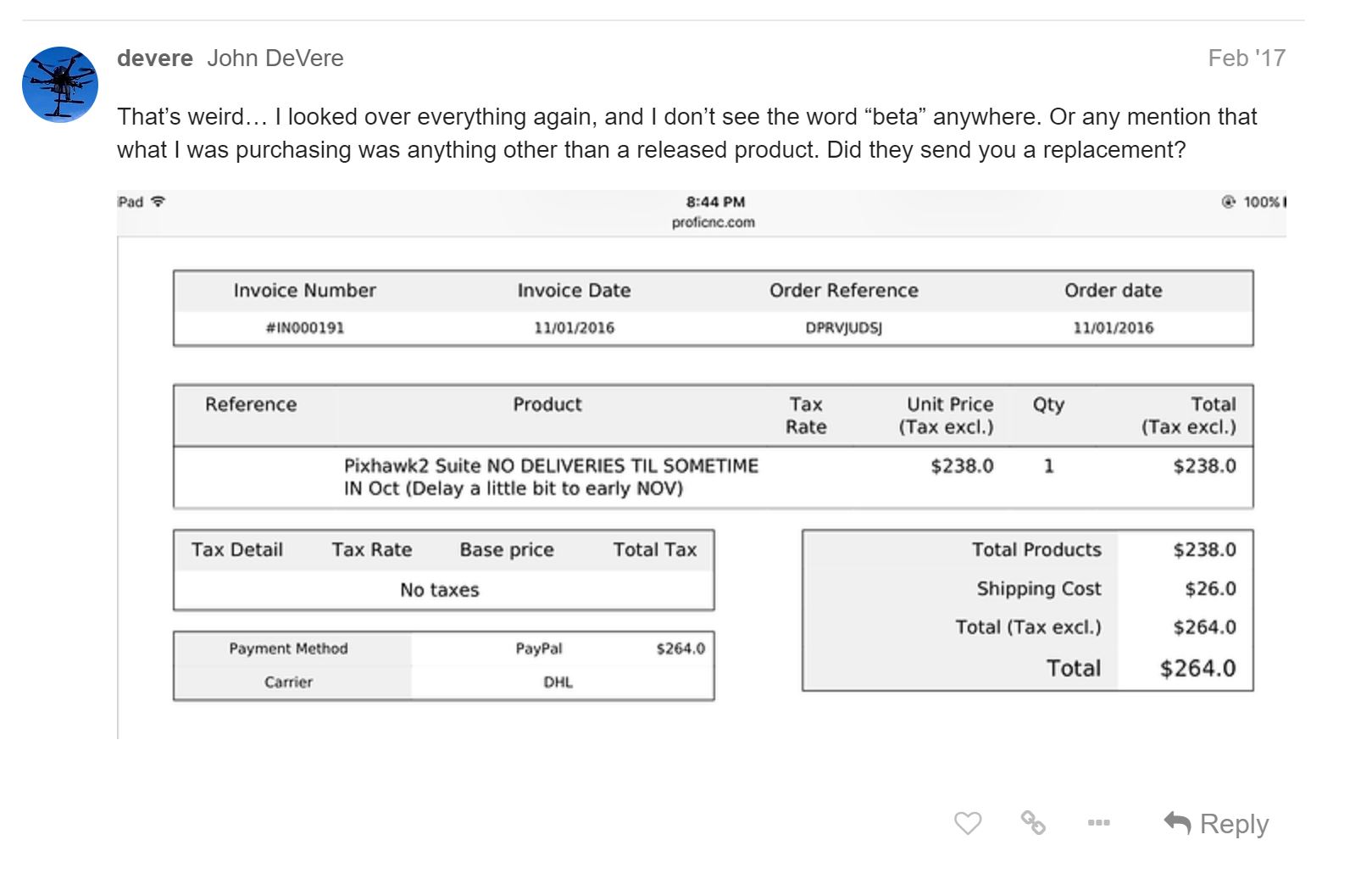
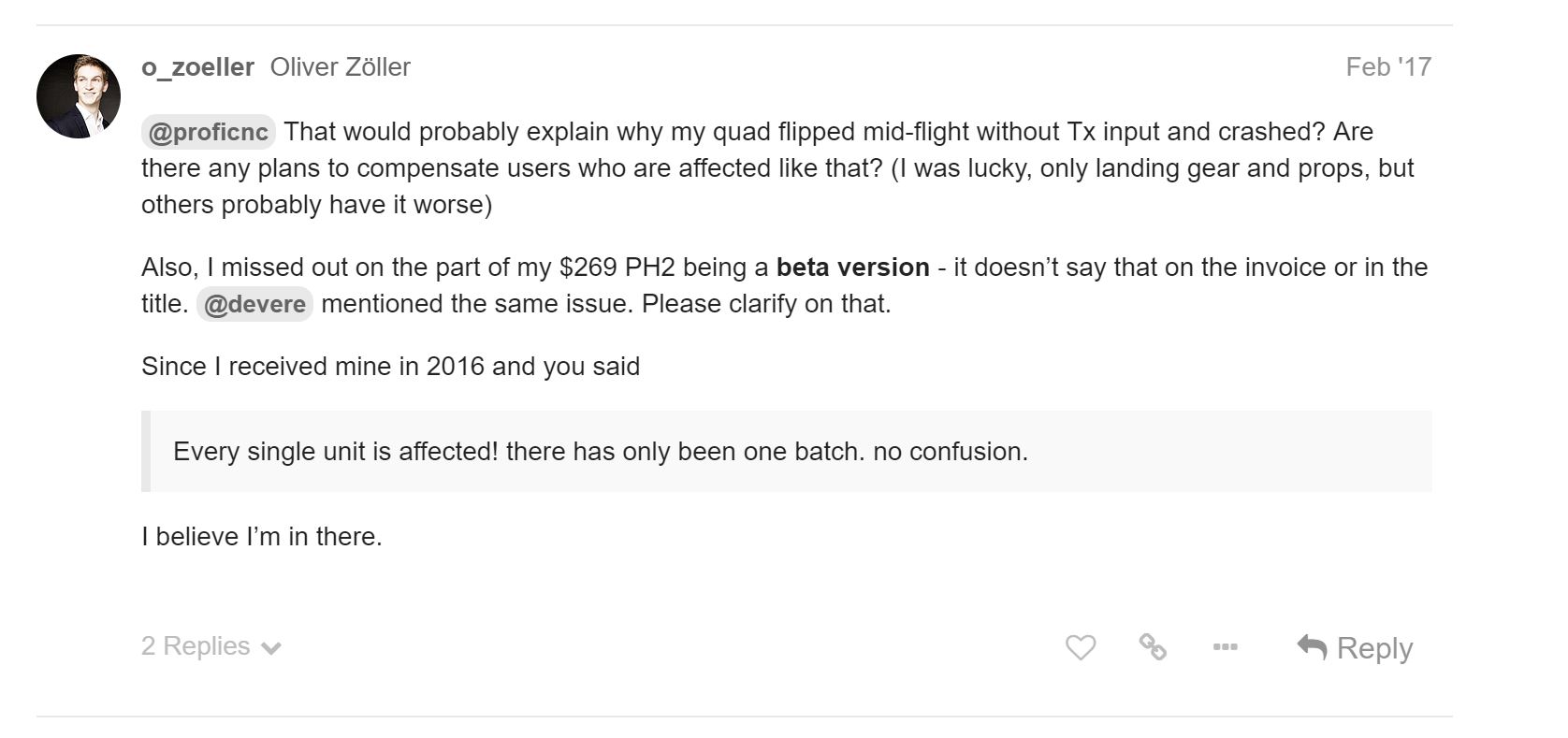
(If there are concerns with hardware sold, they should probably first be addressed to the vendor, who in turn will (hopefully) solve them with their supplier.
Generally being an “early adopter”, I have also on occasion found (in any space of tech), that when hardware is released, firmware and OS support is not always up to speed on initial releases.
I agree that it would be desirable if the adverts/ announcements of anything released to any market fully matches the expectations of paying users. Yet I also have come to learn over time with a wide variety of products, that to smoothly coordinate the entire process of development, production and distribution/ delivery, along with support and good documentation is not a trivial thing to achieve. In this some grace and patience is helpful - and from the supplier side a realistic time line and rather under-promising needed. But let’s keep this thread on track.)
As far as Mission Planner is concerned, it seems like it has a really wide-spread use - whenever there is a video or other images, whether in a hobbyist context, in research or in a commercial setting, very often MP can be seen. And it can do a lot! There are even many features that allow to do helpful things that are hardly/ not yet documented or polished.
Yet I would also agree, that the usability could definitely be improved/ streamlined in various areas, as well as helpful features be added.
For that, I think it is helpful to think beyond purely a software and instead come from a perspective of an overall workflow, and view this more as a tool to accomplish a task.
In that, MP is a pivotal piece for many users, but one that should enhance the overall process; it is unlikely an end on its own (for most users).
I believe today already Mission Planner is used in various settings to accomplish a variety of tasks. Ones that gather data by the use of a UAV, bring value and ultimately aid in decision making.
With all it’s capabilities, MP is well set to continue to be this very crucial component. Yet there is room to grow to bring it to full potential.
Therefore, I think it would be wise, when discussing a “Makeover” rather than already concretely looking at which features should be changed/ added/ improved/ adapted, to first take a step back. And instead to take a well-moderated, good and deeper look at where this GCS, at a higher level, could and should lead to, taking into account user needs and use-scenarios.
And to then lay out a road-map, so users know where this is all headed, as well as communicate the progress.
After this has been gathered and is clear, concrete input on how to achieve this in a user-friendly way may make more sense.
But before that it would be very helpful to leave the silo and look how this all fits into the developing UAV world at large, taking trends and the needs of emerging verticals into account. I would not be surprised if a more modular approach for the GCS would be one outcome, to satisfy user needs.
Lastly: I realize that what I am about to say may be a somewhat touchy subject in an Open Source community. I do see the work and experience that somebody has put into a project as valuable! And if this software/ service/ support helps me to do my tasks faster, safer, more efficient, I don’t have a problem paying something adequate for it either.
(I can gladly (continue to) contribute with donations, suggestions for helpful or desirable features, or point out bugs or other shortcomings and improvements - yet I simply don’t have the knowledge, skills or time to contribute with code/ PRs… and I think I am not alone.)
While software programming is certainly a creative challenge and can be enriching for the sake of just that and it can simply be fun to develop something that “works”, I want to suggest to look also beyond enthusiasts and take into view those members in the community that want to/ need to/ do employ the tools offered here in a commercial context. If they gain value, they may be open to buy a license for a premium version with special features and prime support, thereby contributing funds for more effort to go towards more development and continued growth. (Not every company (MP-user) is large enough to sponsor a larger feature development.)
I don’t have an answer or an exact model as to how to practically and fairly do this, but consider this quote:
No large open source company has successfully survived solely on donations. Nonetheless, these other four business models—and the successful companies that have adopted them—are the proof that open source software can be at the heart of a sustainable and profitable business https://opensource.com/article/17/12/open-source-business-models