Can somebody help or advise about why my Mission: Takeoff which is not triggered permanently instead the status was immediately moving to Resetting Previous Waypoint when I switch to Auto.
FC: Matek F405 Wing
FW: 4.1.0 Stable
Can somebody help or advise about why my Mission: Takeoff which is not triggered permanently instead the status was immediately moving to Resetting Previous Waypoint when I switch to Auto.
FC: Matek F405 Wing
FW: 4.1.0 Stable
Do you have a mission loaded?
Otherwise the auto pilot want to go to RTL (the one and only way point available).
Yes, Takeoff is the only mission I have.
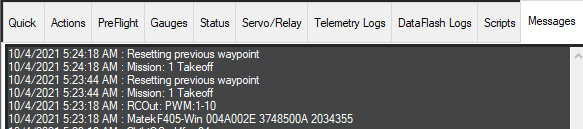
I’ve checked and confirmed in the messages, Mission: 1 Takeoff was triggered, at the same time Resetting Previous Waypoint follows. I’ve edit my post above with the screenshot…
Is it something related to my FC RAM?
No, it’s not related to the RAM.
There are some other possibilities to let the flight controller do a Mission reset.
Do you use one of the parameters: RCx_OPTION = 24 Mission reset ?
Or the parameter: BTN_FUNCx = 24 (mission reset) ?
If you shake to trigger Takeoff, then maibe “crash detection” get active
prev_WP before the first waypoint reached is current location, you can check function verify_nav_wp() in ArduPlane/commands_logic.cpp, it contains the codes if (cmd_passby == 0) { prev_WP_loc = current_loc; }, which may help.
Hi, crash detection switch off the motor… in my case motor was still enable until it crashed, it just doesn’t do the auto take off
from where I can verify the commands/ codes? is there a cli where i can do this?
You can use Mission Planner SITL simulation.
I also suggest you add another mission item after takeoff that is unlimited loiter with lat=lon=0 and alt=takeoff alt or specific location with takeoff altitude.
Hi, thanks. Sorry I’m new in Ardupilot, how can I check this?