Very well done! Thanks for the links, I haven’t seen that motor mount before. I agree those MT motors are expensive but they probably don’t care about the heat.
What are you using for OSD and video downlink?
Cheers!
Very well done! Thanks for the links, I haven’t seen that motor mount before. I agree those MT motors are expensive but they probably don’t care about the heat.
What are you using for OSD and video downlink?
Cheers!
The video downlink is a TS5823 and the OSD is a Microminim. The Microminim is running v8## firmware, which is probably overdue for an upgrade, but it works.
The camera is a Runcam Eagle 16:9.
Cheers!
137 mins with mozzie???  Or Im not understand? You have enougth space for batteries? I love endurance and little builds but not always a compatible thing
Or Im not understand? You have enougth space for batteries? I love endurance and little builds but not always a compatible thing  but Mozzie looks the case.
but Mozzie looks the case. 
There has been several delays due to other projects an obligations, but I am now getting close to the maiden with my my MT quadplane. As said before I have experience with both arducopter and pure arduplane, but this is my first quadplane 
I wonder how you guys have organiced the flight modes on the radio (what switces and how they are configured)? Also what flight modes are you using?
I also guess it is an idea to start out with a limited number of modes for the first flights, until I get familiar with the craft and having it tuned better?
Hi Ron,
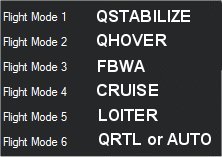
I use a Taranis X9D+ so my 6 flight modes are on the 6-position rotary knob on top of the radio. For my QuadPlanes, I used the order below. The biggest change to remember when flying a QuadPlane versus an APM plane is that your emergency bailout mode is QSTABILIZE instead of Manual. It is also good that you are familiar with copters.
The main thing I miss from Copter that is not in Plane is being able to select a separate bailout switch. I usually use this for RTL on copters but it would be nice to also use it for emergency bailout on planes.
When first starting out, I test more Copter modes like QSTABILIZE, QHOVER, and QLOITER. Once happy with the hovering performance, I then switch to the sequence below which I have Amber sound audibles for and a laminated card taped on the transmitter. If things go wrong, I turn my flight mode switch all the way clockwise for Flight Mode 1.
Good luck!
Thanks a lot for your answer. Your mode setup seems nice and is quite close to what have set up alreay. I also really miss that you don’t have the 7nt mode for RTH as in copter. I have never gotten around to install the rotary knob on my Taranis and I am not to sure it suits me (I have one somewhere in a drawer). I will stick with the switches for now
We have a snow storm going on now, but when the wheater eases up I should be ready for the maiden 
+3 about miss separate switch in planes.
Are your guys using the internal compass in the PH or are you disabling it, when using an external one?
I disabled the compas in pix 1
I also disable the compass on the Pixhawk.
Disable it is then  The MT is configured and ready for maiden. Just waiting for the weather to improve a bit.
The MT is configured and ready for maiden. Just waiting for the weather to improve a bit.
Very nice and neat! It looks ready to go and makes me long for warmer weather. Our first full day of Spring hit 35 degrees F, so it’s finally above freezing!
Video from the maiden with my Mini Talon Quadplane. Let the tuning start 
The F80 1900kv motors have plenty of thrust on the 7x4 apc props and the craft was initially hovering at 25% stick in q_stabilize. Only yaw seems sluggish and it sort of overshoots the stick commands.
A few pictures
A quick one. When having the accelerometer set for level flight (airplane mode), and the apx 5deg forward tilted motors, the craft creeps forward in all non GPS modes. Is there a way around this?
Hi Ron,
Great test! It looks like it hovers nicely. You’ll want the forward creep for transitions and when yawing in hover. Remember that you’re not flying a copter but rather a quadplane. The normal operation is not hovering in place in no wind conditions but rather moving forward into the wind. Hover times on take-off and landing are relatively short. Autonomous modes will compensate so you need to adjust when flying manually. The first time you accidentally transition or hover with the wind at your back will be an eye opener. The quadplane setup becomes more natural after a while when flying manually. When flying autonomous, it does a better job than my manual flying.
Thanks Greg. regarding the forward freep, I see your point and will just compensate manually with the sticks during hover testing. I will do a few more sessions to tune the quad part, before transitioning to forward flight.
I am trying to get the craft to hover at 50% throttle stick in Q_stabilize (hovers at about 25% stick now) and I can not find the parameter “Q_thr_mid” in apm plane 3.5.4. Has this been changed to something else, and the Wiki not updated, or is there something that I am missing?
Ron,
It learns itself pretty fast. Here are the settings.
Q_M_HOVER_LEARN,2 for Learn & Save
Q_M_THST_HOVER,0.2 to 0.8
I think the default is 0.35 for THST_HOVER. I have not needed to set them manually.
Make sure SERVO_AUTO_TRIM is enabled and you will be amazed at how fast the plane flies level without stick offsets.
Thanks for answering. I have been looking at these parameters, but have not changed the q_m_thst_hover based on what I read here: https://github.com/ArduPilot/ardupilot/issues/6652 From this I get that it only works for altitude hold modes (q_hover?). Maybe this has changed over the last fw releases, and now also has effect in q_stabilize?
q_m_hover_learn is as default set to 2, but I also thought this was for the q_hover and q-loiter modes?
I have now set the servo_auto_trim to 1 and will try that out.




