it would need motor controllers that can support telemetry.
https://ardupilot.org/copter/docs/common-dshot-blheli32-telemetry.html
another way to do it would be to look at the IMU for when the vibrations stop.
1 Like
ok but how can i open the .bin files with QGC to look at them?
not sure, I use mission planner.
unfortunately I still do not understand how to do this exactly now. can you give me a short step by step guide?
google is our best friend:
https://ardupilot.org/copter/docs/common-downloading-and-analyzing-data-logs-in-mission-planner.html
https://ardupilot.org/copter/docs/common-diagnosing-problems-using-logs.html

If you use BLHELI ESCs then the motors will stop within a few turns - they wont free-wheel to an eventual stop like old ESCs.
Or if you turn on the “brake on stop” feature the motors will be braked hard when commanded to stop and the resulting forces will try to tear the motor from the arm, and will certainly undo any self-tightening props.
Land, disarm → props shoot up in the air leaving the multirotor on the ground 
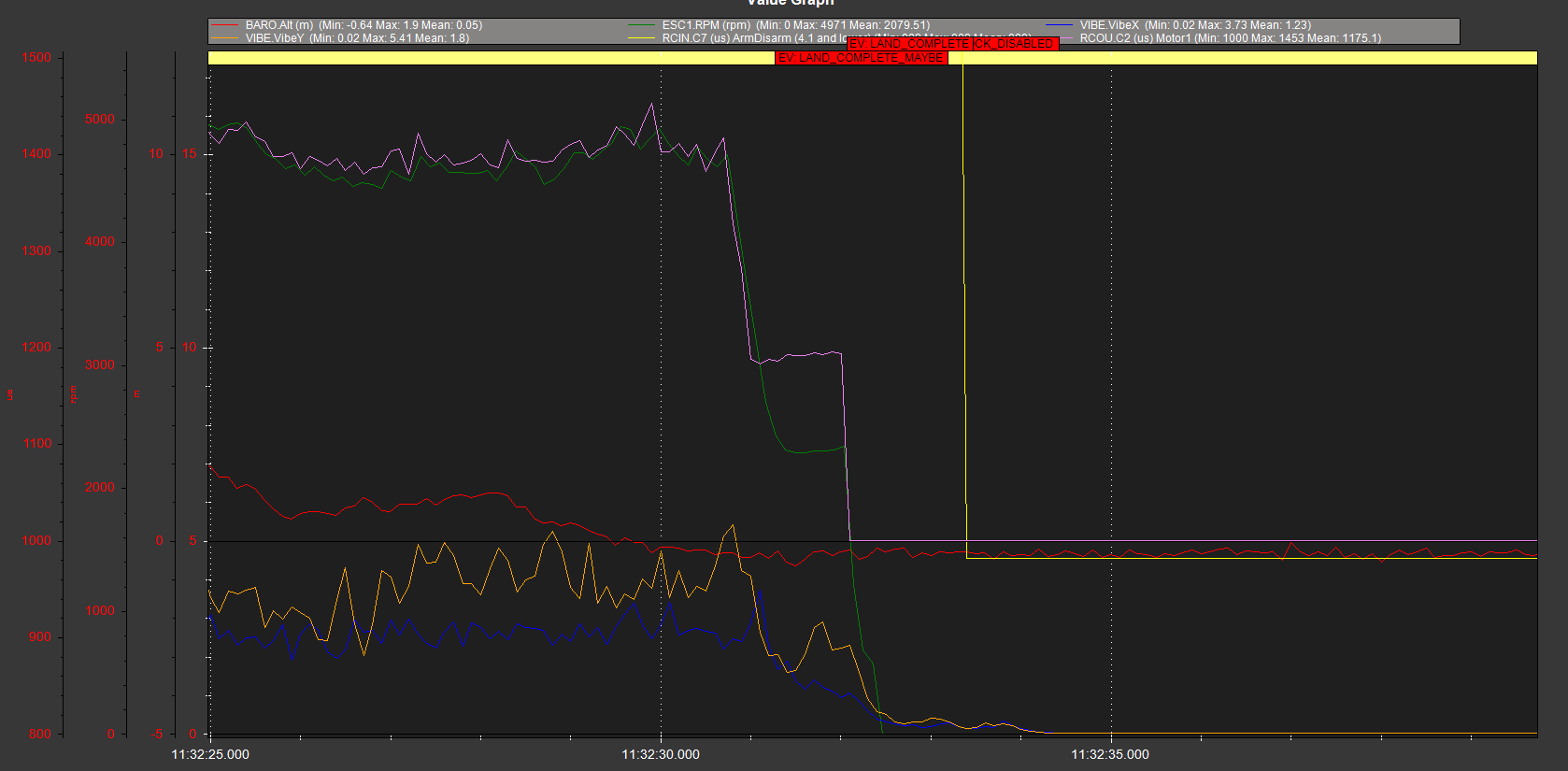
Here’s pic from one of our logs with normal landings and using an arm/disarm transmitter switch. I don’t actually have a log available where we’ve hit disarm before landing was complete, or emergency-stop.
But you can see in Arducopter even a good landing detection stops the motors very quickly, and disarm or e-stop would be equally fast. I cant imagine any human-noticeable delays.
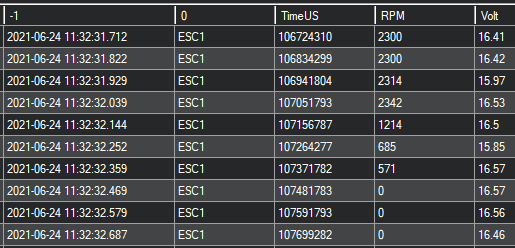
When I zoom in, or look at the actual data, I can see the time from disarm due to landing, to motors at zero RPM is only about 0.4 seconds.
You can also see from the graph how precisely a BLHELI ESC can make RPM follow the commanded input. X and Y vibrations are shown to prove that RPM really does drop as fast as the ESC reports.
The human-operated disarm switch (yellow line) doesnt come until about a second later, after Arducopter has already sorted itself out.

EDIT:
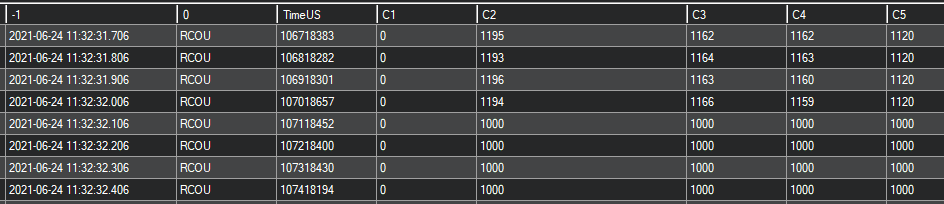
Here’s the RCOUT to the ESCs as Arducopter represents it in logs, since these ESCs are BLHELI using DSHOT and the real data to them is serial, not PWM. (Note that on this aircraft the main out 1 channel wasnt used, motors started from main out 2)
ESC’s are commanded to 0 (1000 PWM in this representation) at 11:32:32.106 , only 0.039 seconds after the disarm status at 11:32:32.067