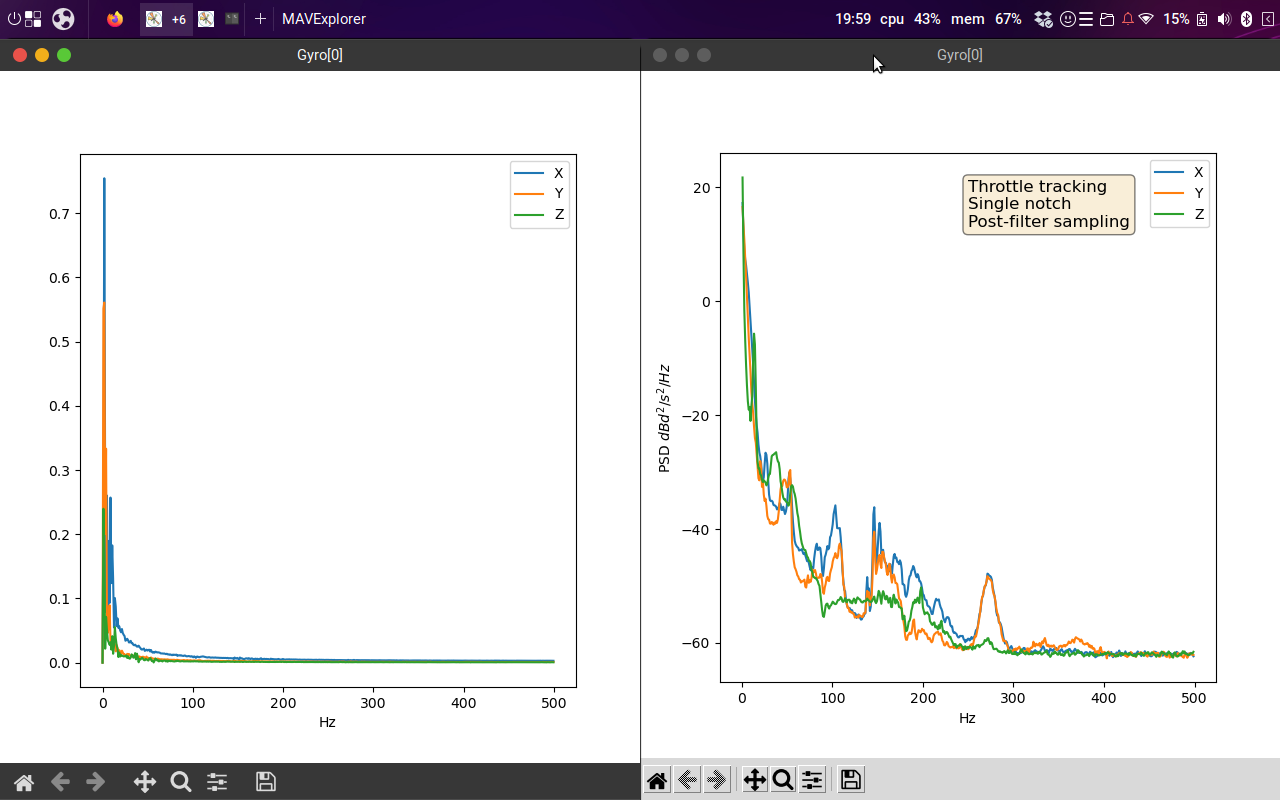
I’m sure it’s obvious, but both graphs are from the same log file. The MavExplorer graph on the left makes me think the dynamic notch filter is done and dusted. The mavfft_isb graph on the right makes me think I need to add another harmonic, and maybe a static notch filter.
My question here isn’t as much about tuning, as it is understanding why these two FFT graphs are so different when they are from the same source?
Andy, I’ve been watching your video “Frame resonance revisited”. (so this is all your fault ) You made a comment that all frames will have a resonance frequency. I agree with that. So based on the graphs above being post-filter can I assume that the dynamic notch (INS_HNTCH) and gyro filter (INS_GYRO_FILTER) have managed to capture that? I’ll try to find a log that has pre-filter data when I have a moment to see the difference.
For reference this is an X500V2 frame. 10" props. HNTCH is 90hz and GYRO_FILTER is 42.
I just had a chance to try out INS_LOG_BAT_OPT,4. On a Matek F405WSE quad and mavfft_isb.py says that I’m getting pre and post filtering, but I only see one set of data (Gyro0). I just looked into F405 limitations and nothing jumped out at me as this could be an issue. The pixracer I also tested seems to be working (Gyro0 and Gyro3). Any ideas?
Edit: I just realized I haven’t updated that quad and it’s still on 4.2.2. Is that more likely the issue? (aka: Pilot error)