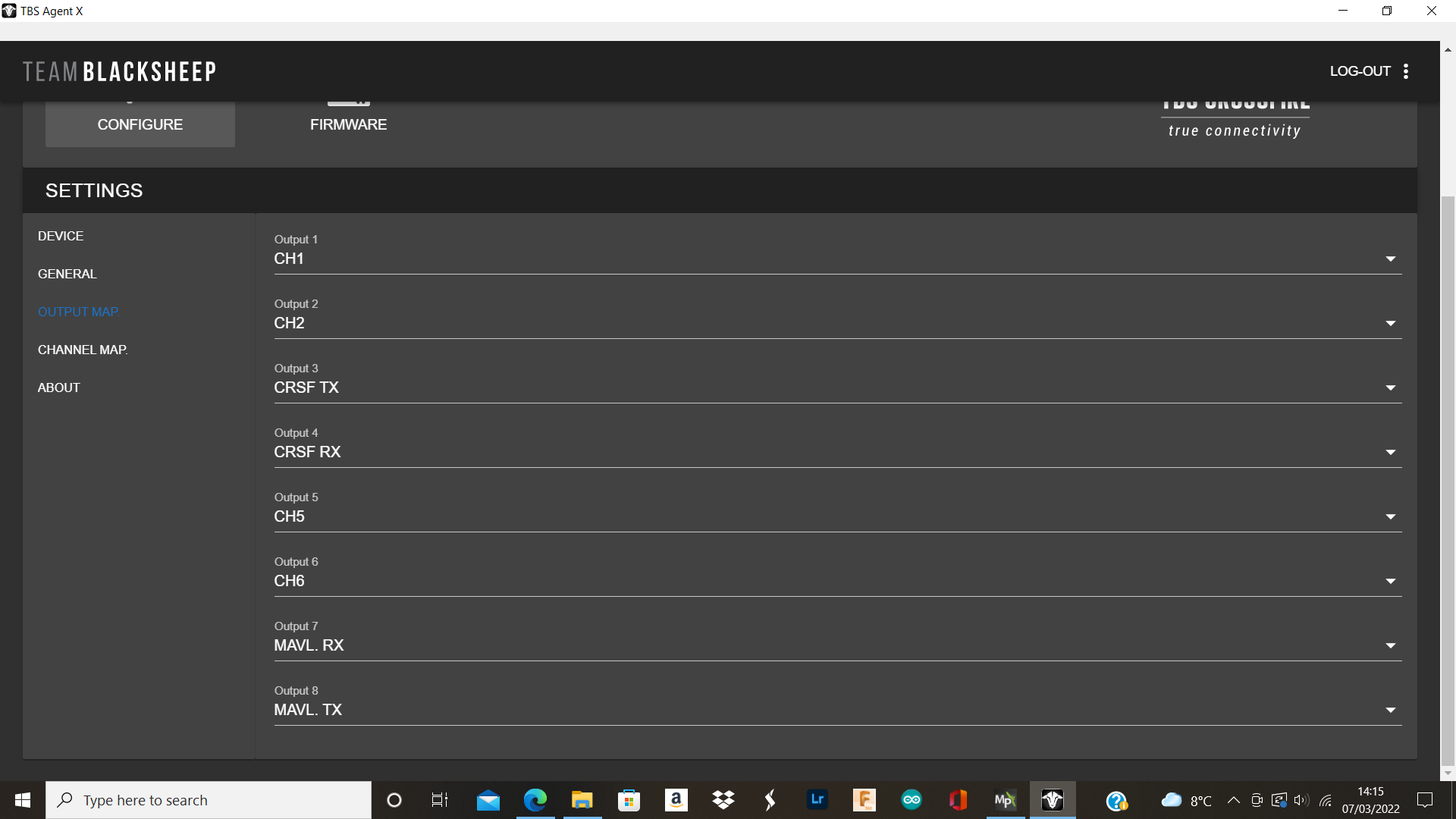
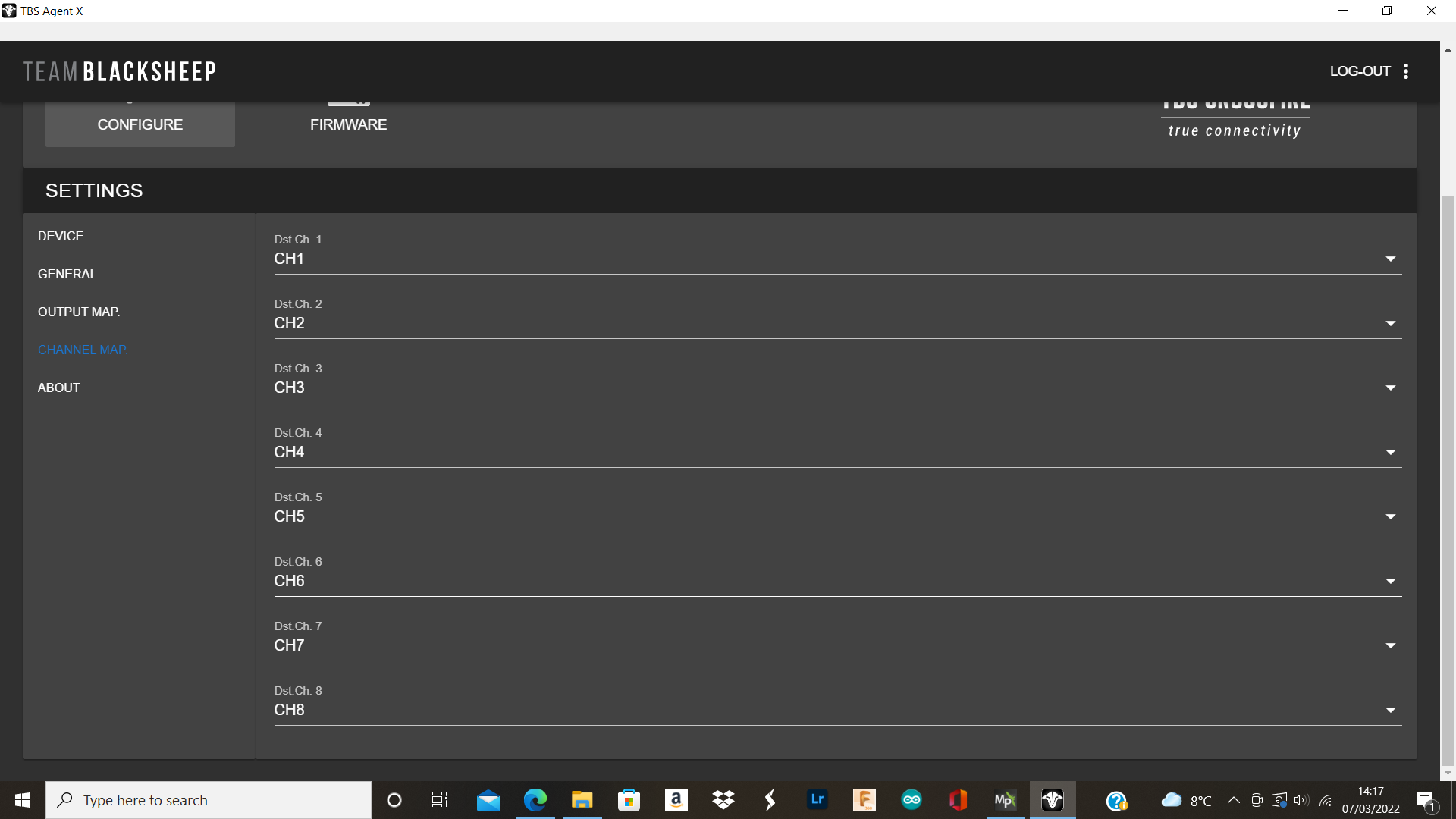
I’m after some help setting up my Matek H743 Flight controller with TBS Crossfire and diversity receiver, I have all modes working as it should but the problem I have is the servo channels and not sure if I have the crossfire receiver set up correctly, I have servos working but the travel doesn’t seem to be much and also cant get my motor to work, I cant get the throttle channel to its minimum position at 1000? minimum position is at 1500, I assume this is why I cant get the motor to work. I have the Crossfire receiver wired from channels 3 to Matek H743 RX6 and 4 to TX6, I’ve attached some screen shots of what I have done so far and settings for the receiver. Any help with this would be greatly appreciated
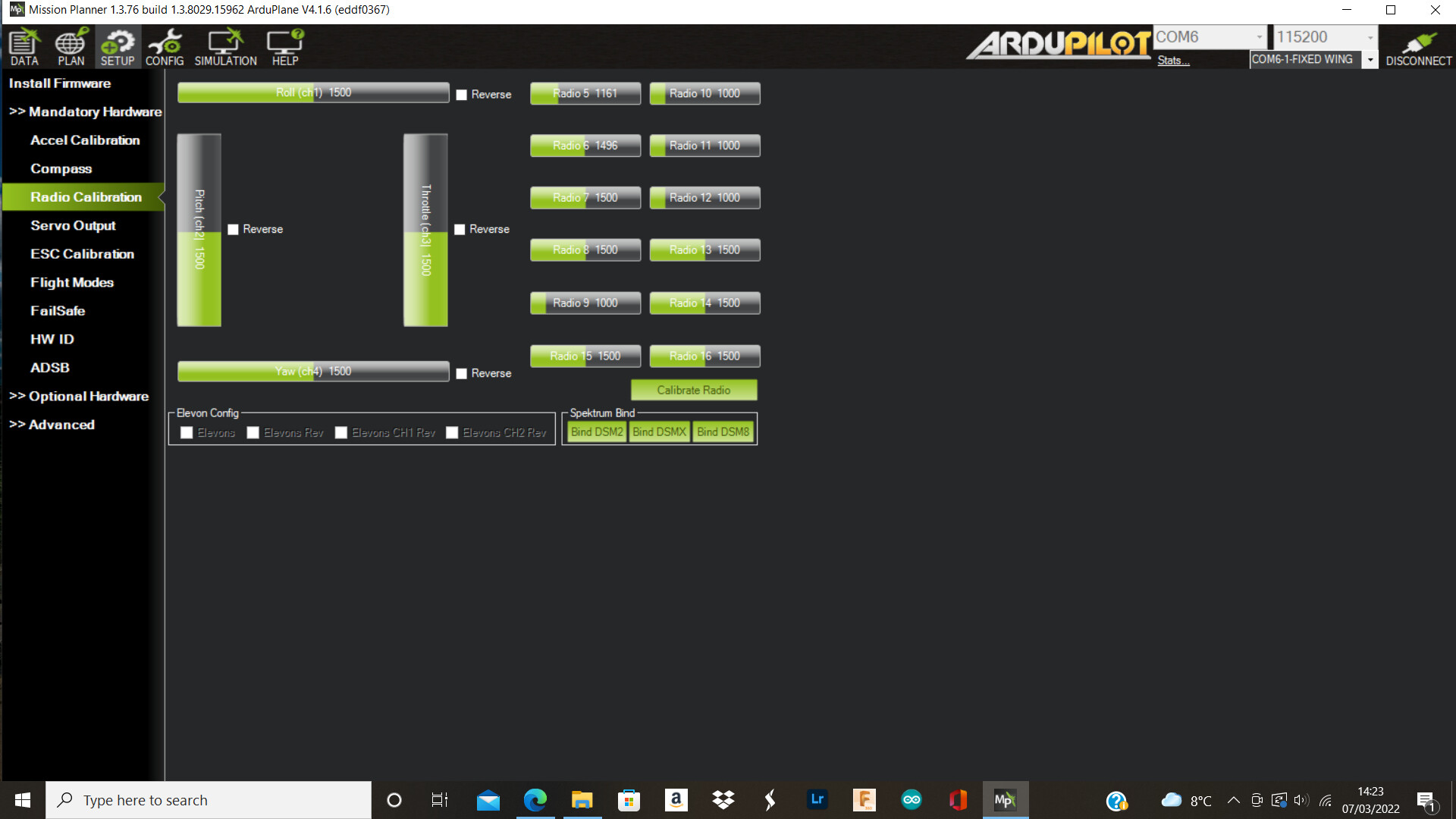
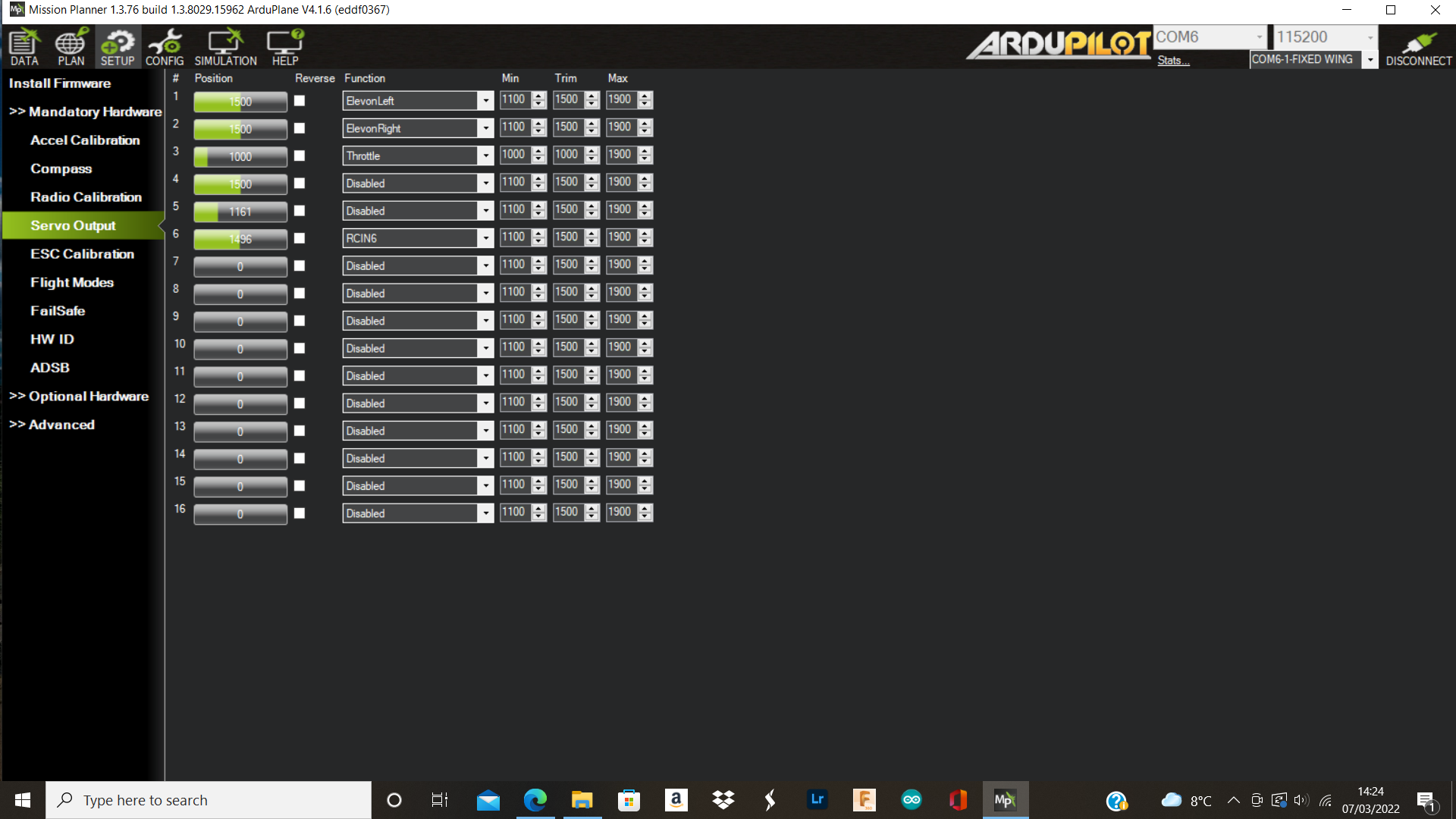
If Arduplane registers the input from the CRSF receiver and you can do the RC calibration, it is setup correctly. The RC link is just a medium, transporting the signals from the transmitter to the receiver/autopilot. The input and output ranges are independent. You setup the input ranges at the transmitter (or better, just leave them at default, also no mixes, no dual rates, no expo) and then you setup the output neutral and min/max with the “servo output” screen, so every control surface of your plane goes as far as you want and is centered correctly. Arduplane maps the input to the output, so full stick travel means full control surface deflection in manual mode.
If your throttle does not go below 1500us, redo the RC calibration and follow the instructions. The throttle has to be all the way down at the end of the calibration.
Thanks for your advice, I realised it was my Taranis xd9 plus that needed calibrating. So now I have the motor working. A couple more problems I have now is a delay in the servos movement, they move fine, then all of a sudden pause … then carry on?. And also switching flight modes does nothing to the planes manor when everything is connected, radio is programmed and shows all flight modes being selected in mission planner?