I’m setting up a new flight controller Matek H743 slim on a quad,
and struggling to setup the optical flow sensor 3901-L0X,
I tested 2 of them, same results on a table bench.
Setup with Copter 4.2.2, performed the check as described in :
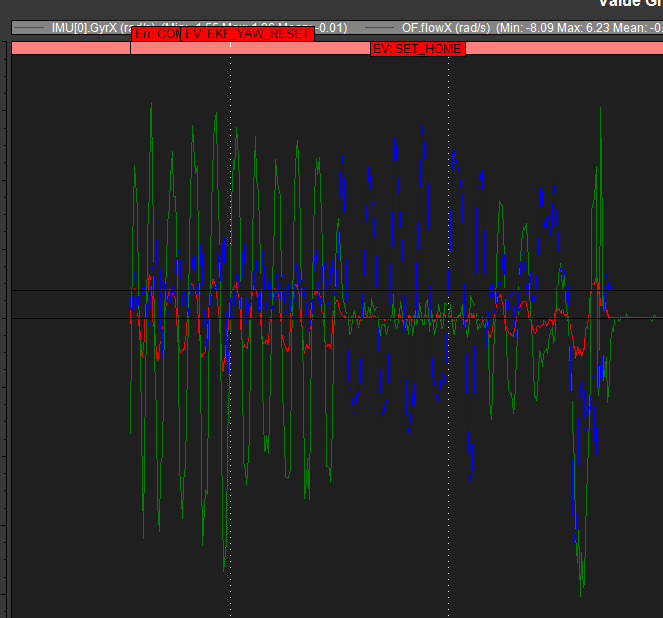
the graph of flowX/Y bodyX/Y with respect to IMU gyros are around 10 times higher
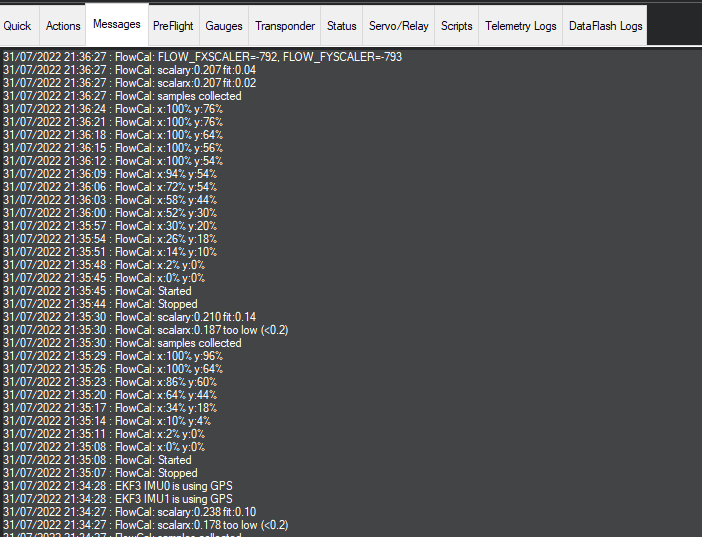
then I performed an “inflight” calibration holding the quad by hand at 2 meters from the floor
just to have a second group of data.
And this auto calibration confirmed around -800 in both FLOW_FXSCALER and FLOW_FYSCALER
I don’t have the chance of fly the quad yet, but I would like to ask if anybody tested same FC+FLOW with no issue.
I was afraid of some major mistake or issue, now I can proceed with further steps in the setup.
Still, it’s a bit surprising to me, that this setting is not reported in the product spec.
And the only way to figure this out is the new autocalibration feature.
Matek should advise in the product info to use such values for calibration.
I’m still struggling with the optical flow, seems more related to the X axis, I tried changing some parameters of flow PIDs, but the issue it’s still there, oscillations around a few Hz by feeling
Advises or sharing of such parameters for cross checking would be more than welcome, thanks in advance.
Eventually, I will arrange to connect via mavlink and change some values during the flight, but I need to arrange the connection hardware first with a telemetry modem.
general PID not optimal was probably the main reason for the wobbly hovering at 1…5m from the ground.
I interpreted this issue as a flow issue because in Stabilize was ok,
and wobbly altitude was compatible with the flow sensor, and I had some doubt about flow sensor parameters as previous posts.
But, probably, the prop wash at that distance from the ground together with bad PIDs created the issue.
So, I disabled the flow sensor, made an auto-tune round, hovering is now ok.
Enabled again flow sensor… no visible changes, still need to analyze the log, hovering still as good as before with GPS only.
I still have several questions about flow sensor, the first one :
In the log I see 80ms delay between flow and gyro,
I see in the parameter description that 100ms is “already included”,
so, do I still have to write 80ms in the param, or -20ms ?
Ths parameter in my opinion is very important, much more than flow P, I etc…
Greets
Giorgio
PS Still strange to me that no hints are present in the Matek website regarding their product …
I believe you don’t see these 100ms for the “within the sensor” lag, because you see the “averaged” and hence delayed measurements in the logs. So it really seems you need to set 80 to EK3_FLOW_DELAY.