Hi, I’ve been met a problem that when I upload the lastest master firmware to my quad. The vehicle is keep rotating in air. I see the log the DesYaw is increasing. Is there any idea obout this?
i post the URL here:
https://buaaeducn-my.sharepoint.com/:u:/g/personal/zonghang_qin_buaa_edu_cn/EZn8sWs--1NOg25u1bBLjB4BCJIcGcVVgv-EJzGHw7fMhg?e=Q5Pz4t
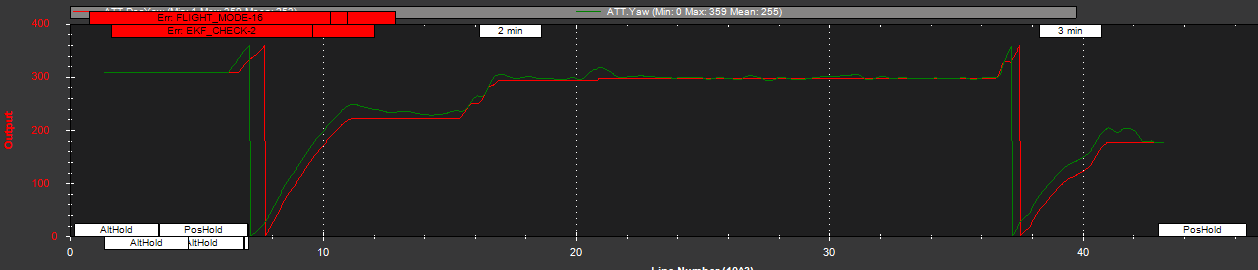
you can see clearly that we don’t push the yaw stick, but still the desyaw keep increasing. How could it be possible in this master branch?
Could it be a vibrations issue ???
Eosbandi
(Andras Schaffer)
3
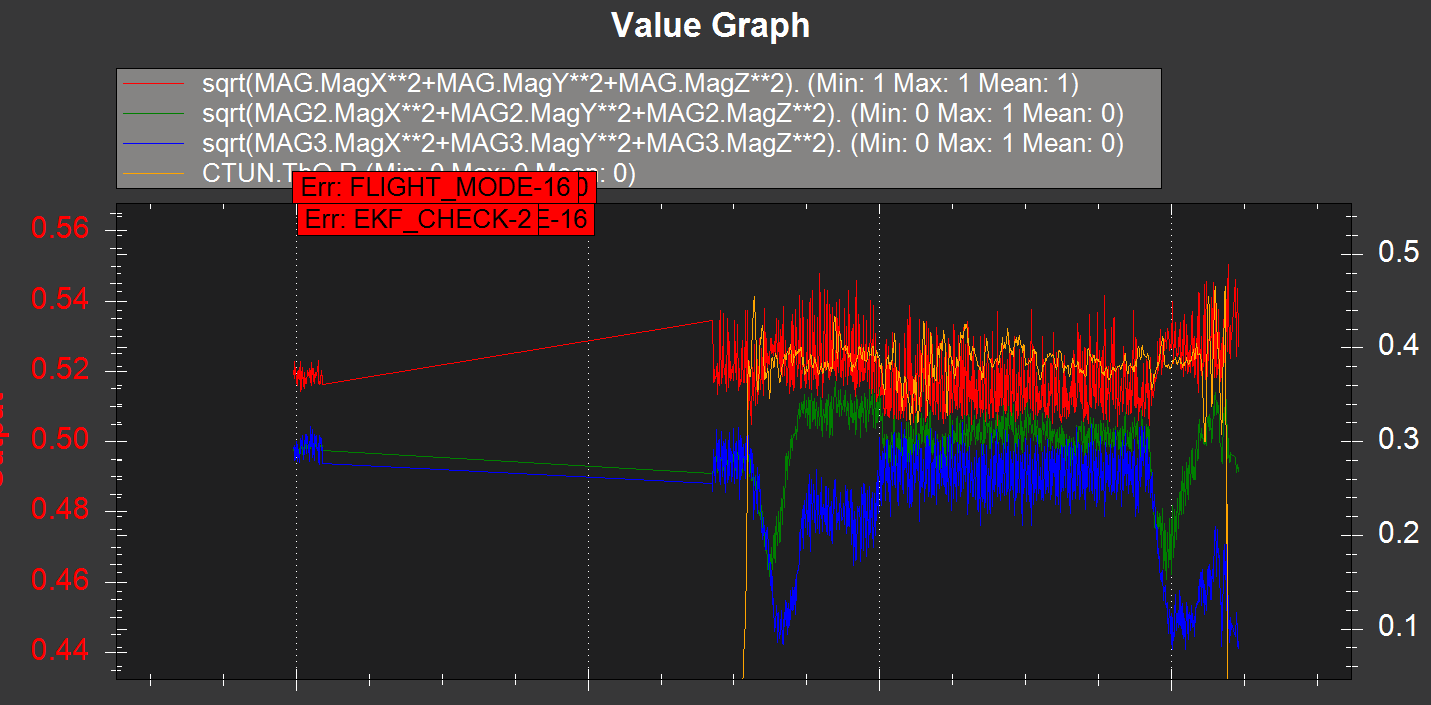
Mag looks quite noisy and change with throttle. Try move it away from power cables.
But, the copter-3.6.7branch can do it well. What the difference between the master and the tag branch copter 3.6.7
I got the same issue hope someone can help.
I’m sure not. same vehicle using master it did bad rotation but the released tag branch copter 3.6.7 did well
@rmackay9 can you take a look at this. Looks like user error, but there might be something else.