Hi all,
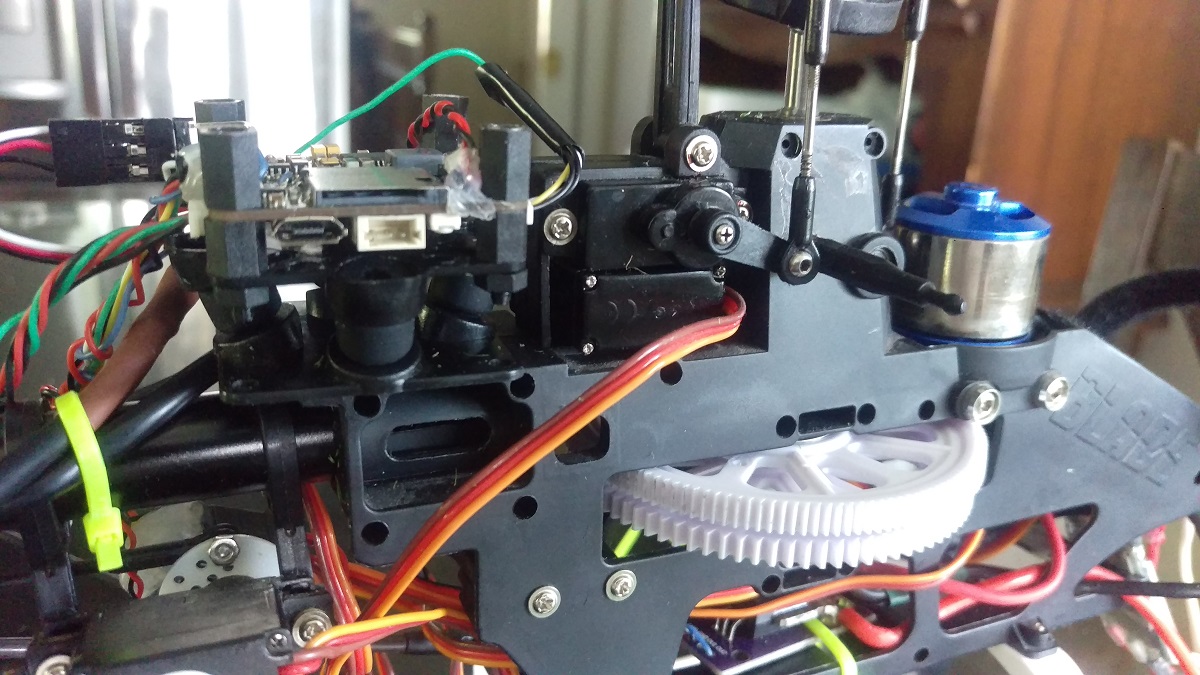
Its my first traditional helicopter build on Blade 450 3D with a flybar.Heli was flying fine before installing arducopter.Board is OmnibusF4V3Pro running latest stable release and is hard mounted inside the frame under the main gear.
When i arm it,everything seems normal and no ekf messages and no gps related messages.But as soon as i start the motor,i start getting all king of error messages.I was only able to hover slightly as its kind of unstable.GPS is mounted on the tail boom.Could it be due to carbon fibre main blades and causing the gps signal issues?But my hdop always stayed good.Could anyone please have a look at my log?Thanks. Log
But heli was on before this flight for around 10 mins. I was watching no.of sats to go high and HDOP to go low before arming.I only armed once HDOP went below .8
@ninja_zx11 I would agree that I think it has something to do with the vibrations. Here is a plot of the vibrations and you notice that they spike pretty high and the error occurs about that time. I’m not sure if the GPS glitch is also due to the high vibrations. I don’t know much about what affects the GPS and causes GPS glitches. Sorry.
Thanks Bill for looking at it.I am going to mount my Flight controller board on rubber dampers as currently it’s hard mounted and there is absolutely no vibration damping.
I don’t see a single clip on the accels in that log. The y-axis might be a bit high on vibes, but not to where it will cause this GPS glitching.
Each GPS satellite transmits data on two frequencies, L1 (1575.42 Mhz) and L2 (1227.60 MHz).
Get that antenna away from the GPS receiver. It is entirely plausible that you are overloading the front end on the receiver, especially if the R9 system is using telemetry. You’re too close to the L2 frequency for comfort with the R9 system.
HDOP doesn’t mean anything as far as xy precision of the GPS. It is merely a relative measure of the quality of the satellite constellation and their position in the sky. The atomic clocks on the satellites produces the fundamental L-band frequency. The L1and L2 carrier frequencies are generated by multiplying the fundamental frequency by 154 and 120, respectively. These corrections are superimposed onto the carrier frequencies, L1 and L2. The measured travel times of the signals from the satellites to the receiver are used to compute the range. If those time stamps are off, you will get “glitching”. It has nothing to do with vibration.
I am little confused here.In the docs it says that vibrations under 30 are acceptable.As you said that vibrations on mine heli were not that bad.X and Z under 20 and Y close to 30 when my rotor head reaches its normal speed.Then why i am getting vibration failsafe. Its indicated by vibration compensation on.
We can co-relate EKF fail-safe due to GPS but why there is a vibration fail-safe.I did see in a log that once my GPS location jumped 20~30 meters thou.
I have dismantled my FC board installation but do you think i still should try moving R9mm antenna away or try Frsky 2.4ghz r-Xsr receiver before installing my FC board on a rubber damper plate?Thanks.
If you have a XJT module in your radio and have a XSR receiver handy try that first to see if it gets rid of that GPS problem. That will cause the EKF to fault due to continuous GPS issues and position error, and it looks to me in the GPS outputs that it is really similar to GPS jamming.
You’ll have to do something about the vibration. It didn’t clip the accels (16G limit), but it is pretty high on y-axis and that will cause bad handling. Fortunately that board you have only has one IMU, otherwise without making settings to which IMU is being used it would switch EKF processes and result in loss of control of the machine. The EKF uses the GPS to correct for bias and drift in just about all the other sensors, and without that working properly the system won’t fly.
Your GPS receiver is likely using the defaults. If you are in the U.S. I would configure it to use only one constellation - GPS with WAAS correction. And limit the satellites to no lower than 20 degrees above the horizon. There should be 9 or 10 visible at all times, sometimes up to 12. If you are north of the 50th parallel then configure it to use GLONASS (Russian satellites) which is more accurate in the northern latitudes. This gives you the fastest update rate for your GPS vs the defaults where it acquires every satellite from every constellation it can grab. The receiver is multi-band, but the refresh rate drops if you let it suck in every constellation it can get. You only need 4 satellites for a 3D fix. 7 is enough for a RNAV approach in manned aircraft. Many people think the more satellites they get, the better it is. That ain’t how those GPS receivers work.
Thanks Chris for all the good info.Yes i have Qx7 and i will try R-Xsr and see if that makes any difference.I will be mounting FC on a damper too then for better handling.
Any idea what part on the heli could create Y-axis vibrations?Y axis vibrations are in roll axis right?
So finally was able to hover nicely in position hold mode!! Thanks all for your help!!
Now X and Y axis vibrations are under control but Z axis vibrations seems to be high.How are Z axis vibrations defined?Does it mean that heli is vibrating in yaw axis or up and down axis?If its up and down then it could be from the slapping airflow under the rotor blades as i mounted my FC board on a rubber dampers under the blades.
I am going to move the GPS on the top of FC and away from Rx antenna as i still get gps glitch sometimes.Also i will fix all the loose wires.I will also remove the training gear once it gets tuned properly:)
Now could anybody please check my log if i need any tuning or i need to do something?