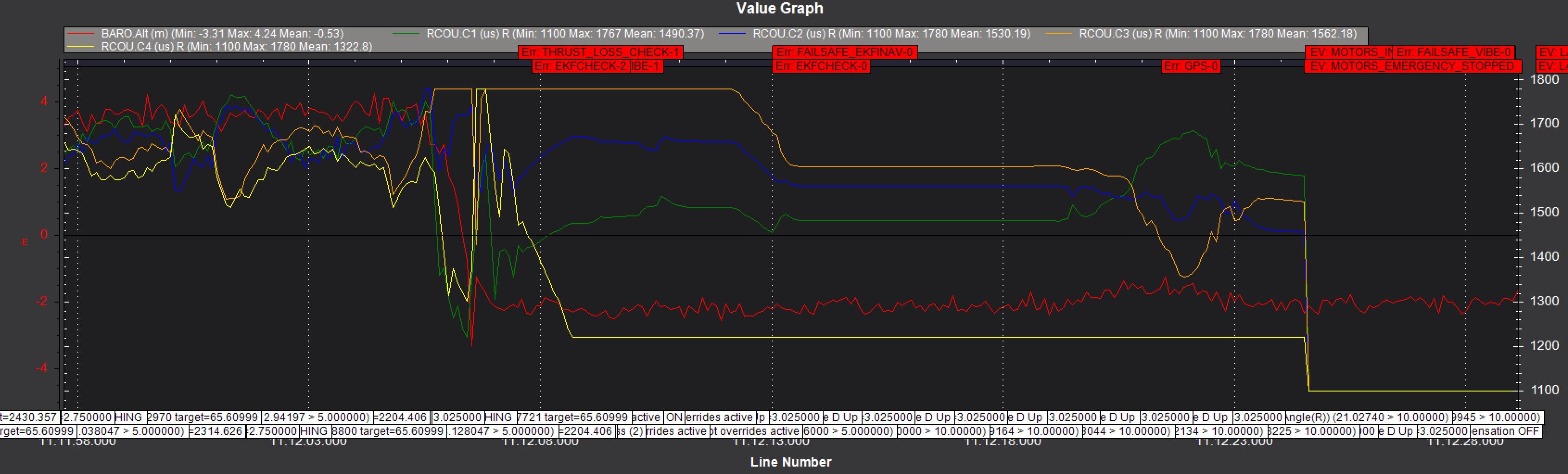
While I was autotuning my quad, at a few minutes in it shut off, crashed and rebooted. Would someone mind looking at this log to see what I am missing? I saw a high Mag field but didn’t think that would cause a reset.
After determining why thrust was lost on Motor 2 (prop, motor ESC.) I would update to latest Arducopter, and then run the Alt>A initial tuning plug-in in Mission Planner. Then configure the Dynamic Notch filter, then think about running Auto Tune.
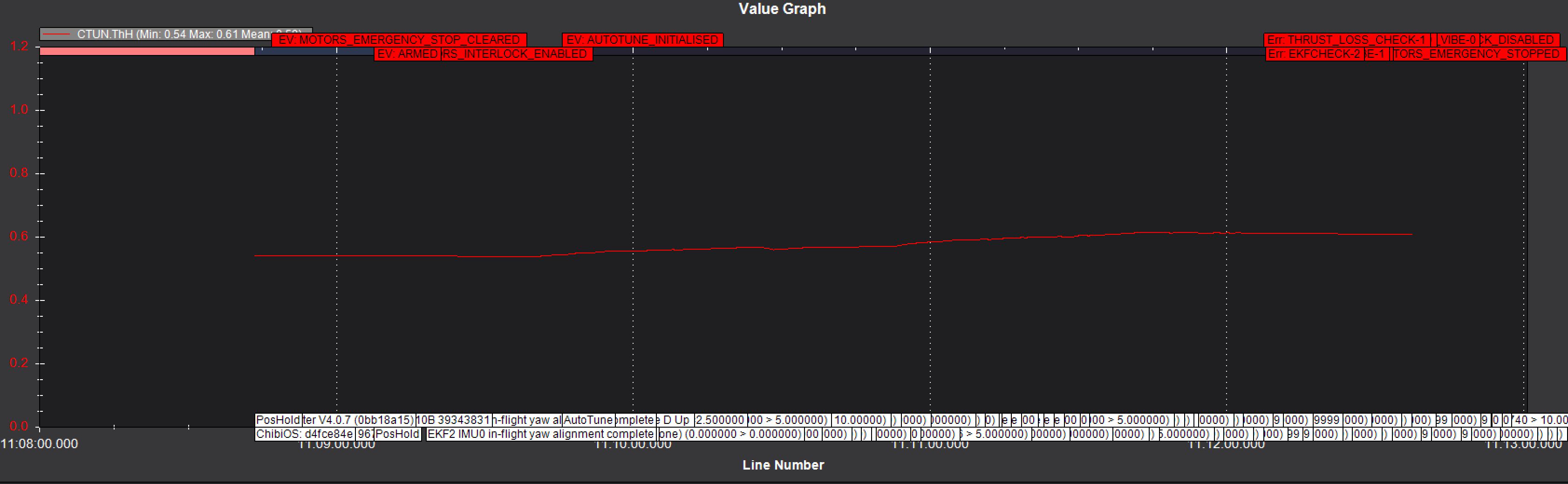
I changed the title, thanks. What could cause the MOT_THST_HOVER? I have only flown before less than a minute. It was at default of 0.34XXXX I believe.
On inspection Motor 3 was twitching and motor 1 will not spin at all. Mot 1 probably from the crash.