Hi dears, I have a quadcopter and it’s almost OK.
After some flight in auto mode loses altitude. But in other modes it’s true.
What is the reason?
Log file : https://ufile.io/dupvyn4u
I have no idea how your Mission was programmed but I would say you have a power/battery problem. The battery sags to <9V under load and the average commanded motor output at hover is ~1800us.

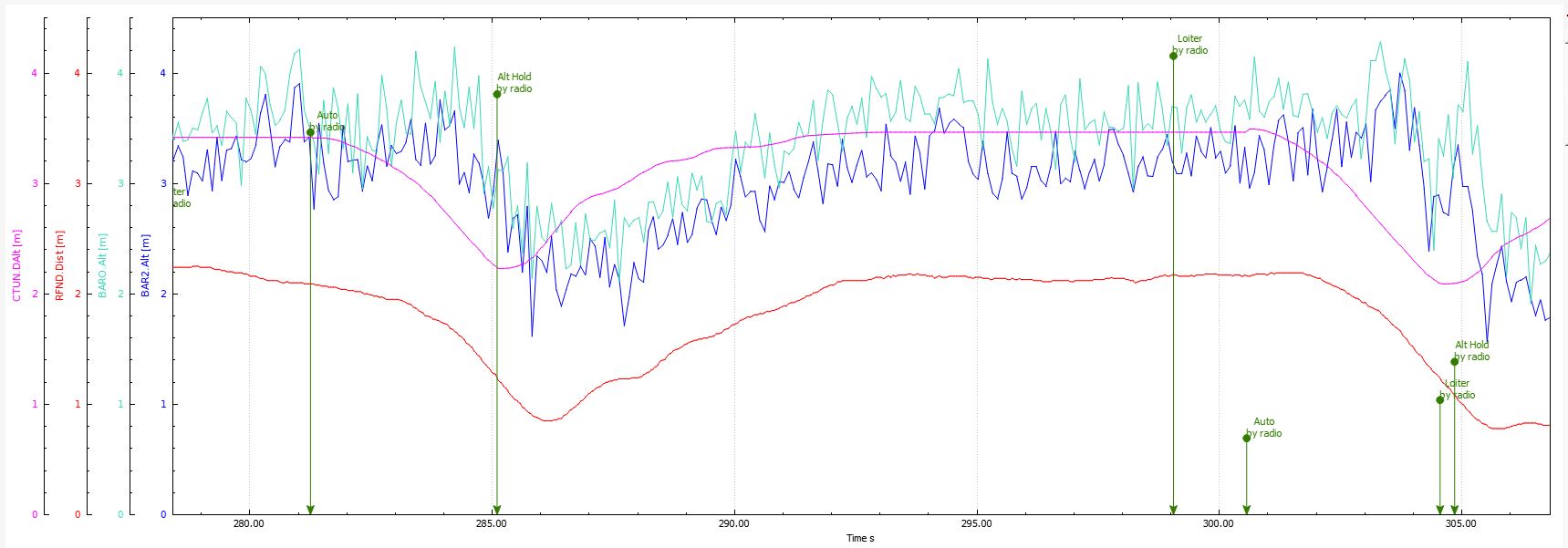
Right, but i was surprised, because in loiter or alt-hold the altitude was true (no reduction).
The mission was short path and without changing the altitude.